 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSUAVE: An Exemplar for Self-Adaptive Underwater Vehicles
Mar 16, 2023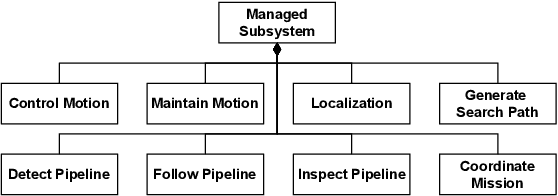
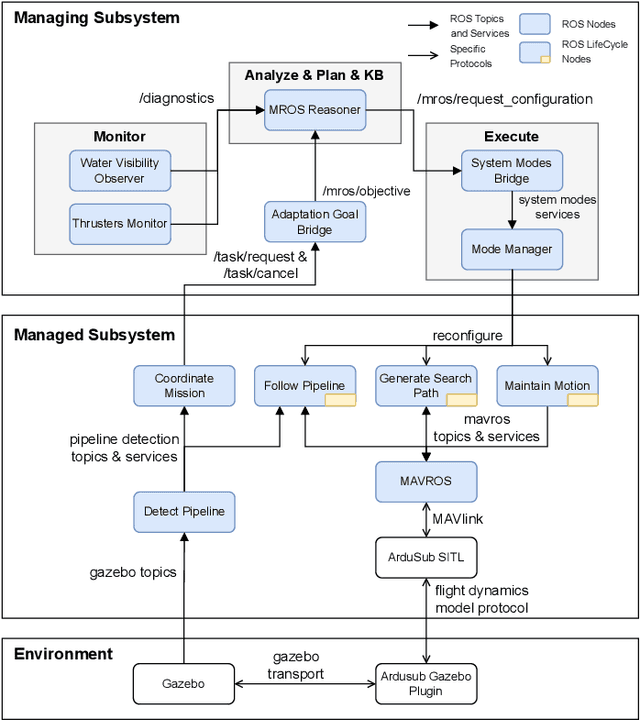

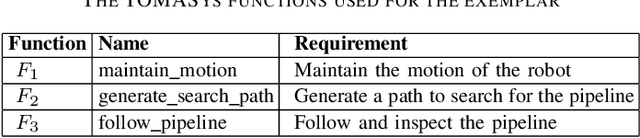
Once deployed in the real world, autonomous underwater vehicles (AUVs) are out of reach for human supervision yet need to take decisions to adapt to unstable and unpredictable environments. To facilitate research on self-adaptive AUVs, this paper presents SUAVE, an exemplar for two-layered system-level adaptation of AUVs, which clearly separates the application and self-adaptation concerns. The exemplar focuses on a mission for underwater pipeline inspection by a single AUV, implemented as a ROS2-based system. This mission must be completed while simultaneously accounting for uncertainties such as thruster failures and unfavorable environmental conditions. The paper discusses how SUAVE can be used with different self-adaptation frameworks, illustrated by an experiment using the Metacontrol framework to compare AUV behavior with and without self-adaptation. The experiment shows that the use of Metacontrol to adapt the AUV during its mission improves its performance when measured by the overall time taken to complete the mission or the length of the inspected pipeline.
Solving Robot Assembly Tasks by Combining Interactive Teaching and Self-Exploration
Sep 23, 2022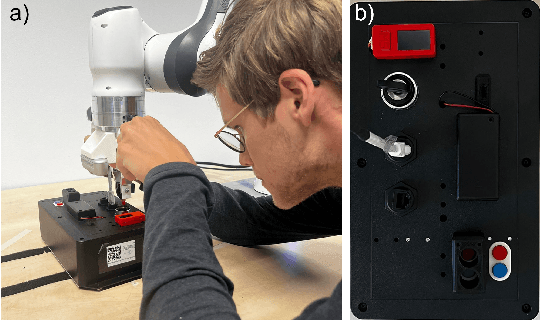

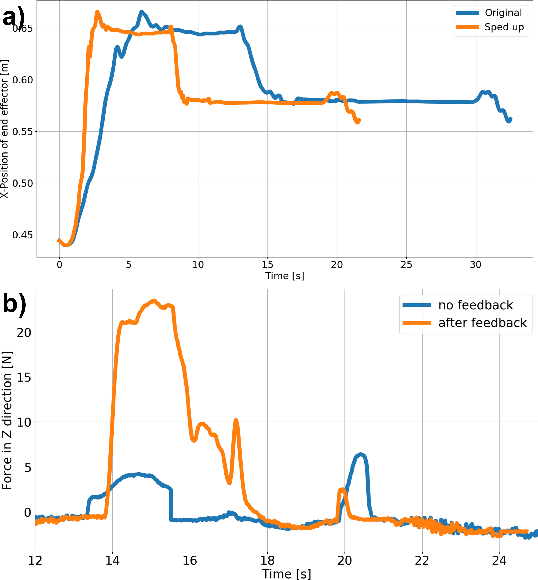
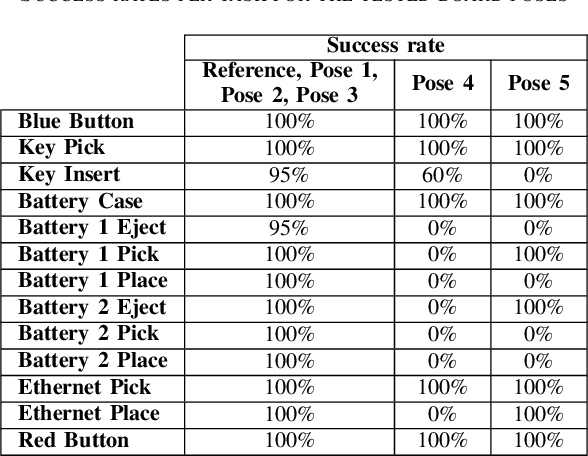
Many high precision (dis)assembly tasks are still being performed by humans, whereas this is an ideal opportunity for automation. This paper provides a framework which enables a non-expert human operator to teach a robotic arm to do complex precision tasks. The framework uses a variable Cartesian impedance controller to execute trajectories learned from kinesthetic human demonstrations. Feedback can be given to interactively reshape or speed up the original demonstration. Board localization is done through a visual estimation of the task board position and refined through haptic feedback. Our framework is tested on the Robothon benchmark disassembly challenge, where the robot has to perform complex precision tasks, such as a key insertion. The results show high success rates for each of the manipulation subtasks, including cases when the box is in novel poses. An ablation study is also performed to evaluate the components of the framework.