 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMachine Fault Classification using Hamiltonian Neural Networks
Jan 04, 2023A new approach is introduced to classify faults in rotating machinery based on the total energy signature estimated from sensor measurements. The overall goal is to go beyond using black-box models and incorporate additional physical constraints that govern the behavior of mechanical systems. Observational data is used to train Hamiltonian neural networks that describe the conserved energy of the system for normal and various abnormal regimes. The estimated total energy function, in the form of the weights of the Hamiltonian neural network, serves as the new feature vector to discriminate between the faults using off-the-shelf classification models. The experimental results are obtained using the MaFaulDa database, where the proposed model yields a promising area under the curve (AUC) of $0.78$ for the binary classification (normal vs abnormal) and $0.84$ for the multi-class problem (normal, and $5$ different abnormal regimes).
A Deep Reinforcement Learning Environment for Particle Robot Navigation and Object Manipulation
Mar 12, 2022
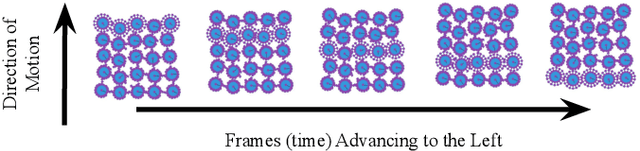
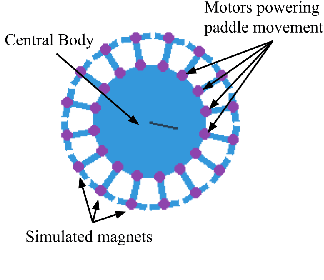
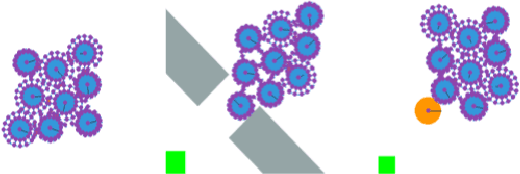
Particle robots are novel biologically-inspired robotic systems where locomotion can be achieved collectively and robustly, but not independently. While its control is currently limited to a hand-crafted policy for basic locomotion tasks, such a multi-robot system could be potentially controlled via Deep Reinforcement Learning (DRL) for different tasks more efficiently. However, the particle robot system presents a new set of challenges for DRL differing from existing swarm robotics systems: the low degrees of freedom of each robot and the increased necessity of coordination between robots. We present a 2D particle robot simulator using the OpenAI Gym interface and Pymunk as the physics engine, and introduce new tasks and challenges to research the underexplored applications of DRL in the particle robot system. Moreover, we use Stable-baselines3 to provide a set of benchmarks for the tasks. Current baseline DRL algorithms show signs of achieving the tasks but are yet unable to reach the performance of the hand-crafted policy. Further development of DRL algorithms is necessary in order to accomplish the proposed tasks.