 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Intrinsic Dataset Properties for Adversarial Machine Learning
May 19, 2020

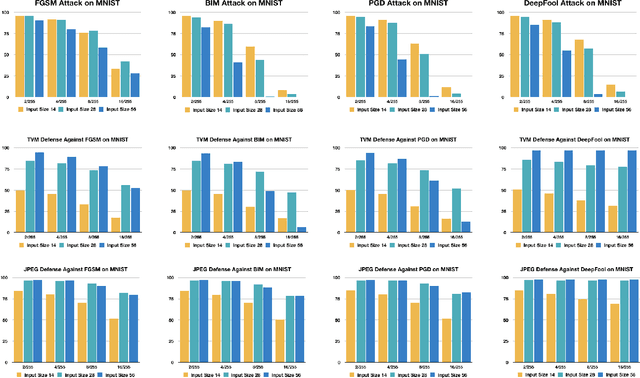
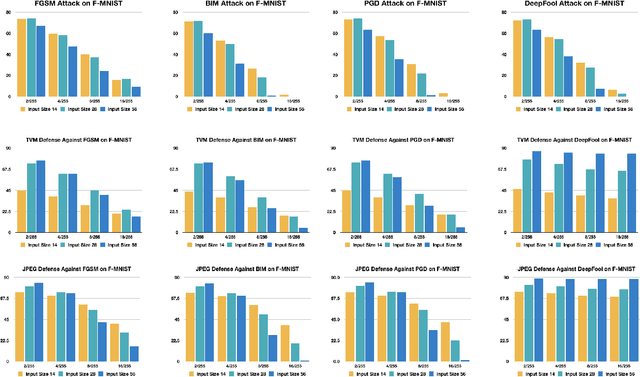
Deep neural networks (DNNs) have played a key role in a wide range of machine learning applications. However, DNN classifiers are vulnerable to human-imperceptible adversarial perturbations, which can cause them to misclassify inputs with high confidence. Thus, creating robust DNNs which can defend against malicious examples is critical in applications where security plays a major role. In this paper, we study the effect of intrinsic dataset properties on the performance of adversarial attack and defense methods, testing on five popular image classification datasets - MNIST, Fashion-MNIST, CIFAR10/CIFAR100, and ImageNet. We find that input size and image contrast play key roles in attack and defense success. Our discoveries highlight that dataset design and data preprocessing steps are important to boost the adversarial robustness of DNNs. To our best knowledge, this is the first comprehensive work that studies the effect of intrinsic dataset properties on adversarial machine learning.
Extreme Relative Pose Estimation for RGB-D Scans via Scene Completion
Jan 05, 2019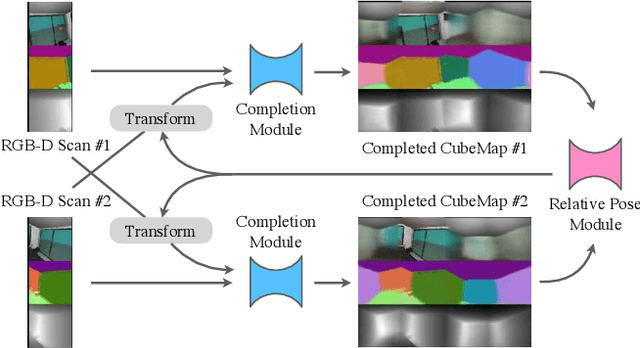
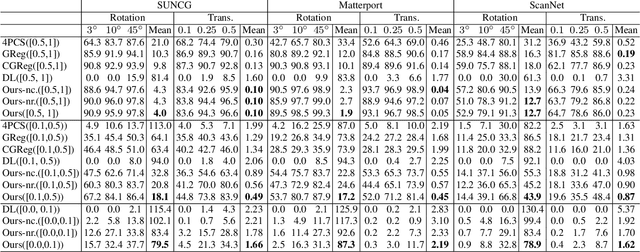

Estimating the relative rigid pose between two RGB-D scans of the same underlying environment is a fundamental problem in computer vision, robotics, and computer graphics. Most existing approaches allow only limited maximum relative pose changes since they require considerable overlap between the input scans. We introduce a novel deep neural network that extends the scope to extreme relative poses, with little or even no overlap between the input scans. The key idea is to infer more complete scene information about the underlying environment and match on the completed scans. In particular, instead of only performing scene completion from each individual scan, our approach alternates between relative pose estimation and scene completion. This allows us to perform scene completion by utilizing information from both input scans at late iterations, resulting in better results for both scene completion and relative pose estimation. Experimental results on benchmark datasets show that our approach leads to considerable improvements over state-of-the-art approaches for relative pose estimation. In particular, our approach provides encouraging relative pose estimates even between non-overlapping scans.