 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDECO: Dense Estimation of 3D Human-Scene Contact In The Wild
Sep 26, 2023
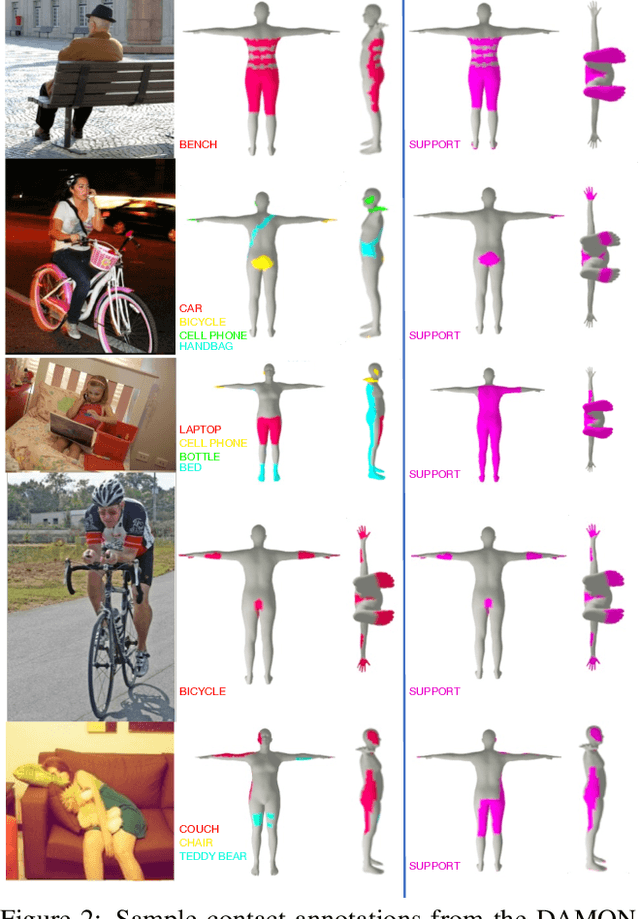
Understanding how humans use physical contact to interact with the world is key to enabling human-centric artificial intelligence. While inferring 3D contact is crucial for modeling realistic and physically-plausible human-object interactions, existing methods either focus on 2D, consider body joints rather than the surface, use coarse 3D body regions, or do not generalize to in-the-wild images. In contrast, we focus on inferring dense, 3D contact between the full body surface and objects in arbitrary images. To achieve this, we first collect DAMON, a new dataset containing dense vertex-level contact annotations paired with RGB images containing complex human-object and human-scene contact. Second, we train DECO, a novel 3D contact detector that uses both body-part-driven and scene-context-driven attention to estimate vertex-level contact on the SMPL body. DECO builds on the insight that human observers recognize contact by reasoning about the contacting body parts, their proximity to scene objects, and the surrounding scene context. We perform extensive evaluations of our detector on DAMON as well as on the RICH and BEHAVE datasets. We significantly outperform existing SOTA methods across all benchmarks. We also show qualitatively that DECO generalizes well to diverse and challenging real-world human interactions in natural images. The code, data, and models are available at https://deco.is.tue.mpg.de.