 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLayer-wise synapse optimization for implementing neural networks on general neuromorphic architectures
Feb 20, 2018


Deep artificial neural networks (ANNs) can represent a wide range of complex functions. Implementing ANNs in Von Neumann computing systems, though, incurs a high energy cost due to the bottleneck created between CPU and memory. Implementation on neuromorphic systems may help to reduce energy demand. Conventional ANNs must be converted into equivalent Spiking Neural Networks (SNNs) in order to be deployed on neuromorphic chips. This paper presents a way to perform this translation. We map the ANN weights to SNN synapses layer-by-layer by forming a least-square-error approximation problem at each layer. An optimal set of synapse weights may then be found for a given choice of ANN activation function and SNN neuron. Using an appropriate constrained solver, we can generate SNNs compatible with digital, analog, or hybrid chip architectures. We present an optimal node pruning method to allow SNN layer sizes to be set by the designer. To illustrate this process, we convert three ANNs, including one convolutional network, to SNNs. In all three cases, a simple linear program solver was used. The experiments show that the resulting networks maintain agreement with the original ANN and excellent performance on the evaluation tasks. The networks were also reduced in size with little loss in task performance.
PlanIt: A Crowdsourcing Approach for Learning to Plan Paths from Large Scale Preference Feedback
Jan 05, 2016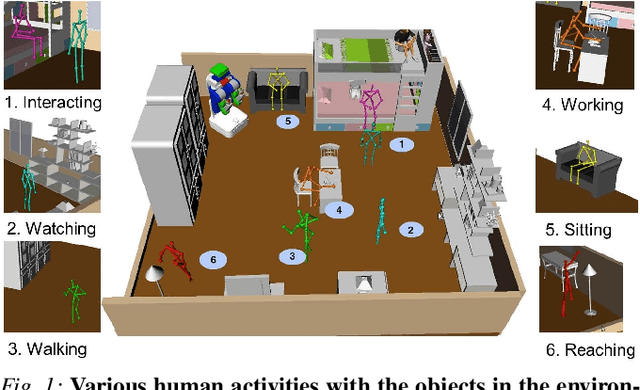
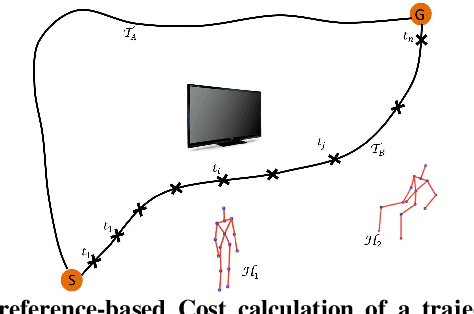
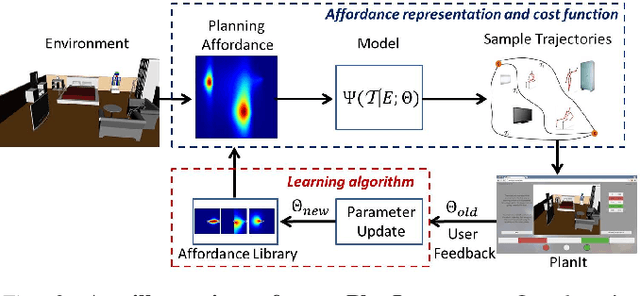
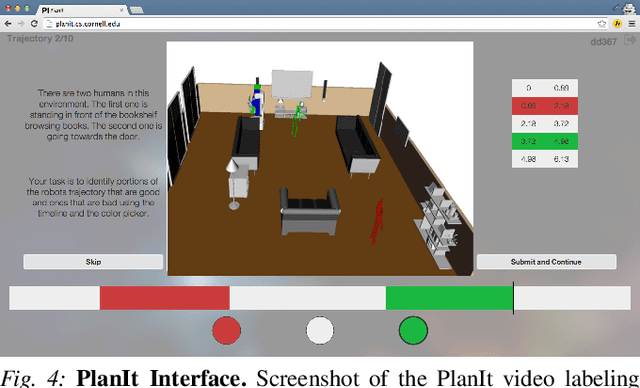
We consider the problem of learning user preferences over robot trajectories for environments rich in objects and humans. This is challenging because the criterion defining a good trajectory varies with users, tasks and interactions in the environment. We represent trajectory preferences using a cost function that the robot learns and uses it to generate good trajectories in new environments. We design a crowdsourcing system - PlanIt, where non-expert users label segments of the robot's trajectory. PlanIt allows us to collect a large amount of user feedback, and using the weak and noisy labels from PlanIt we learn the parameters of our model. We test our approach on 122 different environments for robotic navigation and manipulation tasks. Our extensive experiments show that the learned cost function generates preferred trajectories in human environments. Our crowdsourcing system is publicly available for the visualization of the learned costs and for providing preference feedback: \url{http://planit.cs.cornell.edu}