 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanIt: A Crowdsourcing Approach for Learning to Plan Paths from Large Scale Preference Feedback
Jan 05, 2016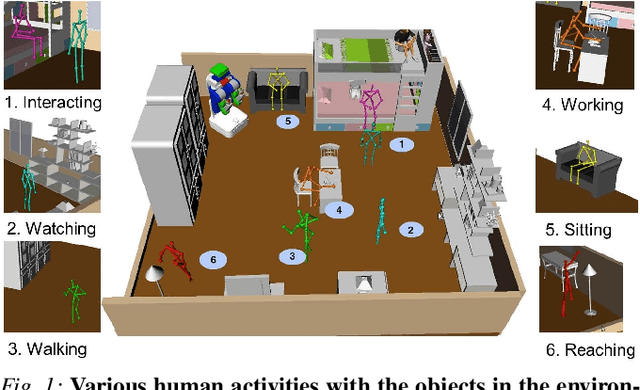
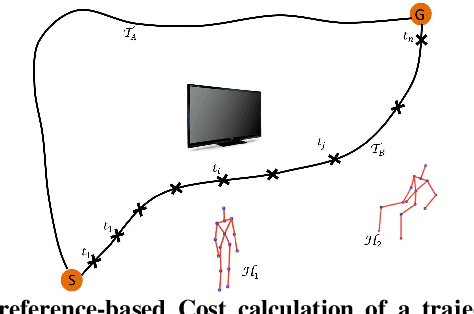
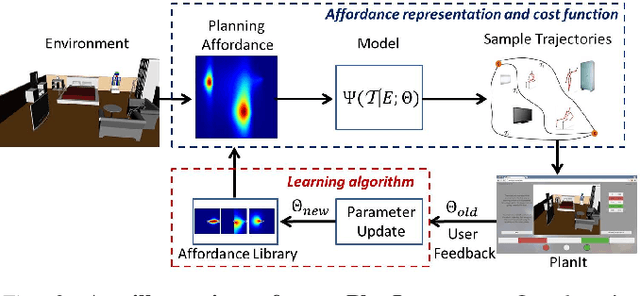
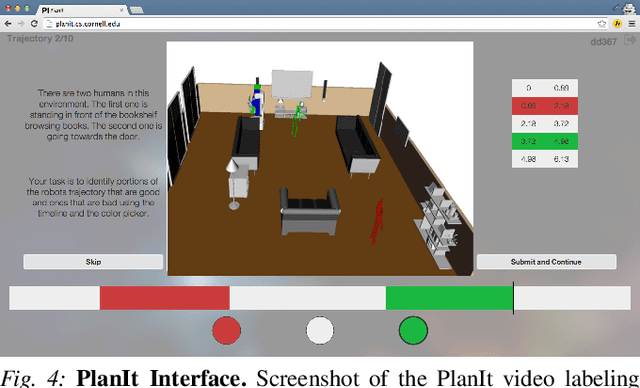
We consider the problem of learning user preferences over robot trajectories for environments rich in objects and humans. This is challenging because the criterion defining a good trajectory varies with users, tasks and interactions in the environment. We represent trajectory preferences using a cost function that the robot learns and uses it to generate good trajectories in new environments. We design a crowdsourcing system - PlanIt, where non-expert users label segments of the robot's trajectory. PlanIt allows us to collect a large amount of user feedback, and using the weak and noisy labels from PlanIt we learn the parameters of our model. We test our approach on 122 different environments for robotic navigation and manipulation tasks. Our extensive experiments show that the learned cost function generates preferred trajectories in human environments. Our crowdsourcing system is publicly available for the visualization of the learned costs and for providing preference feedback: \url{http://planit.cs.cornell.edu}