 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePseudoProp: Robust Pseudo-Label Generation for Semi-Supervised Object Detection in Autonomous Driving Systems
Mar 11, 2022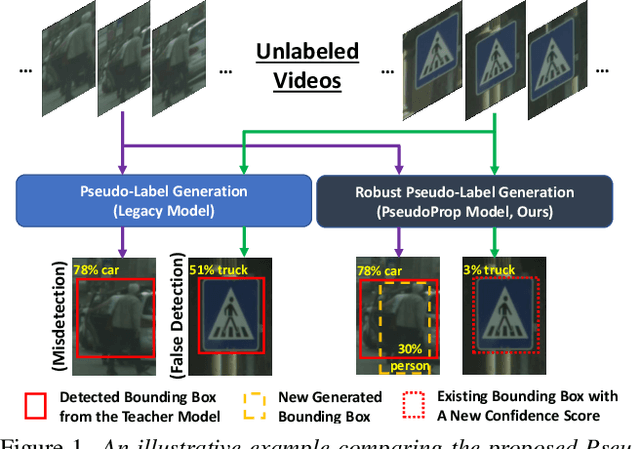
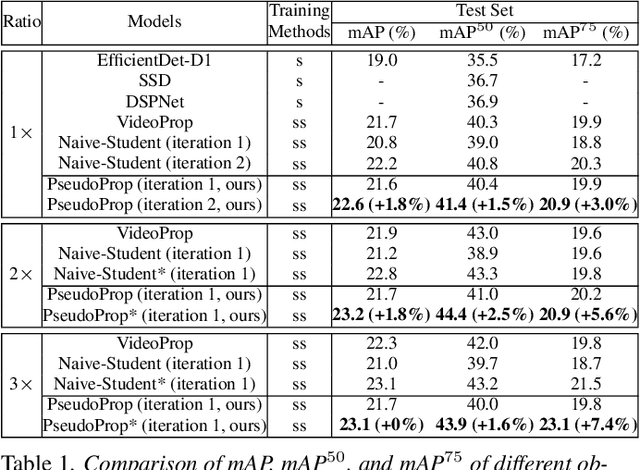
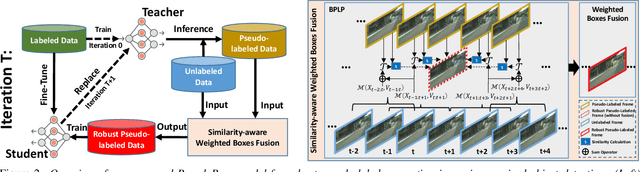
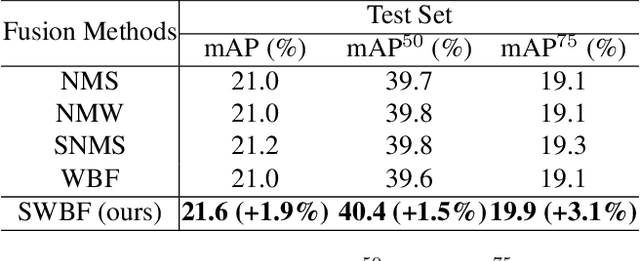
Semi-supervised object detection methods are widely used in autonomous driving systems, where only a fraction of objects are labeled. To propagate information from the labeled objects to the unlabeled ones, pseudo-labels for unlabeled objects must be generated. Although pseudo-labels have proven to improve the performance of semi-supervised object detection significantly, the applications of image-based methods to video frames result in numerous miss or false detections using such generated pseudo-labels. In this paper, we propose a new approach, PseudoProp, to generate robust pseudo-labels by leveraging motion continuity in video frames. Specifically, PseudoProp uses a novel bidirectional pseudo-label propagation approach to compensate for misdetection. A feature-based fusion technique is also used to suppress inference noise. Extensive experiments on the large-scale Cityscapes dataset demonstrate that our method outperforms the state-of-the-art semi-supervised object detection methods by 7.4% on mAP75.