 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCHASE: Robust Visual Tracking via Cell-Level Differentiable Neural Architecture Search
Jul 02, 2021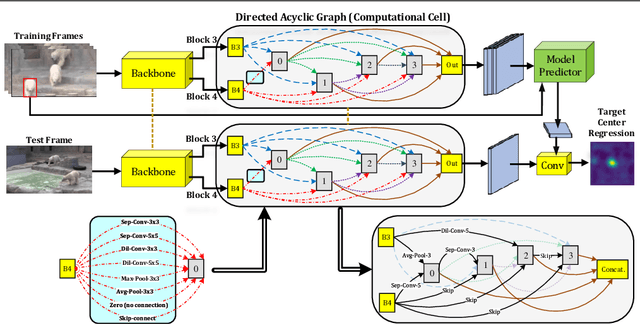

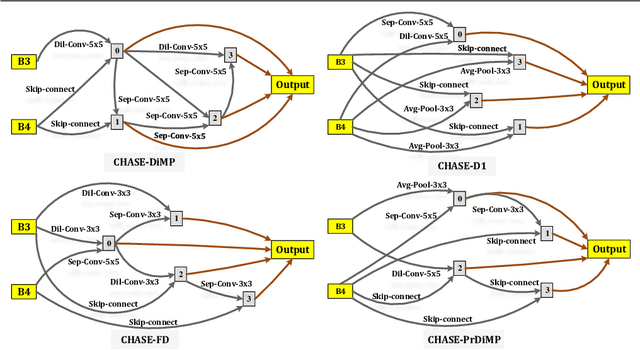
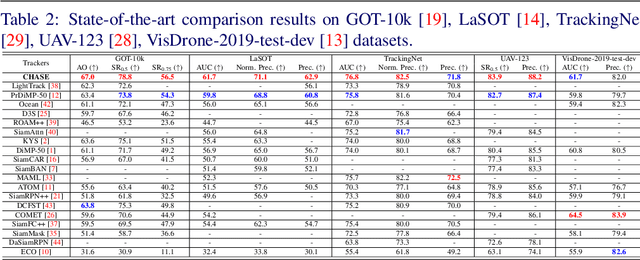
A strong visual object tracker nowadays relies on its well-crafted modules, which typically consist of manually-designed network architectures to deliver high-quality tracking results. Not surprisingly, the manual design process becomes a particularly challenging barrier, as it demands sufficient prior experience, enormous effort, intuition and perhaps some good luck. Meanwhile, neural architecture search has gaining grounds in practical applications such as image segmentation, as a promising method in tackling the issue of automated search of feasible network structures. In this work, we propose a novel cell-level differentiable architecture search mechanism to automate the network design of the tracking module, aiming to adapt backbone features to the objective of a tracking network during offline training. The proposed approach is simple, efficient, and with no need to stack a series of modules to construct a network. Our approach is easy to be incorporated into existing trackers, which is empirically validated using different differentiable architecture search-based methods and tracking objectives. Extensive experimental evaluations demonstrate the superior performance of our approach over five commonly-used benchmarks. Meanwhile, our automated searching process takes 41 (18) hours for the second (first) order DARTS method on the TrackingNet dataset.
COMET: Context-Aware IoU-Guided Network for Small Object Tracking
Jun 04, 2020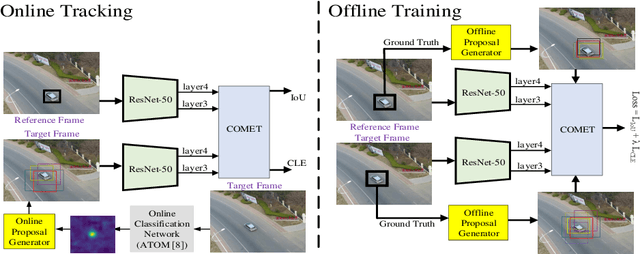
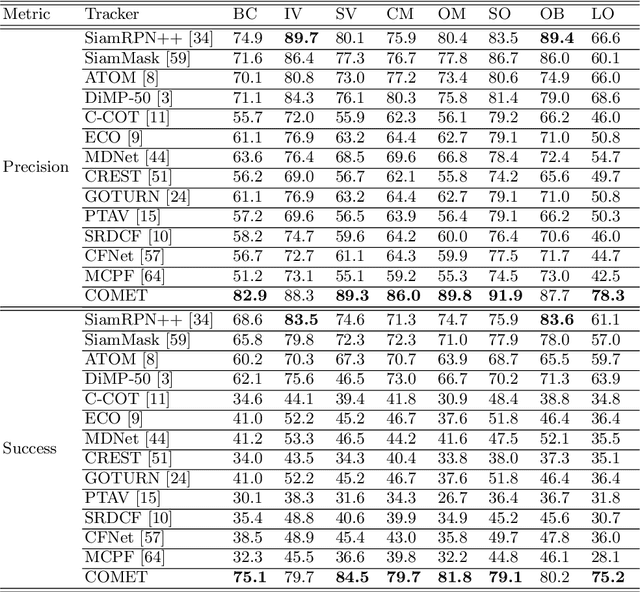
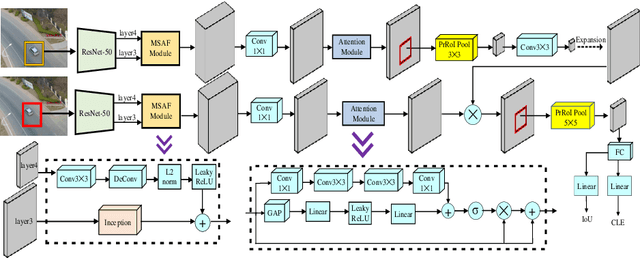
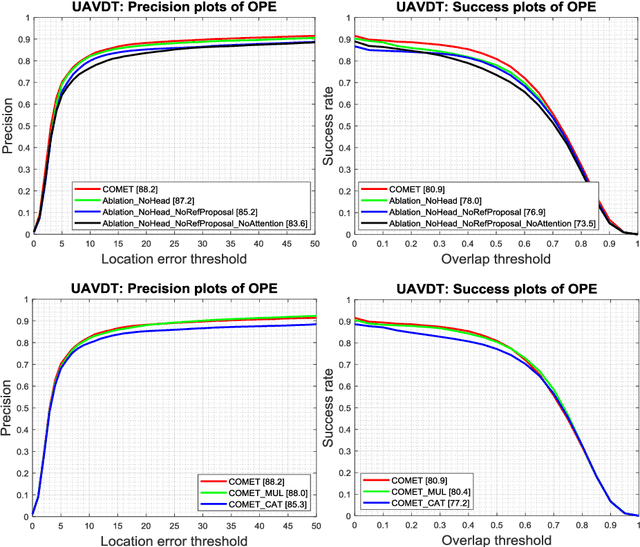
Tracking an unknown target captured from medium- or high-aerial view is challenging, especially in scenarios of small objects, large viewpoint change, drastic camera motion, and high density. This paper introduces a context-aware IoU-guided tracker that exploits an offline reference proposal generation strategy and a multitask two-stream network. The proposed strategy introduces an efficient sampling strategy to generalize the network on the target and its parts without imposing extra computational complexity during online tracking. It considerably helps the proposed tracker, COMET, to handle occlusion and view-point change, where only some parts of the target are visible. Extensive experimental evaluations on broad range of small object benchmarks (UAVDT, VisDrone-2019, and Small-90) demonstrate the effectiveness of our approach for small object tracking.