 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReady to Translate, Not to Represent? Bias and Performance Gaps in Multilingual LLMs Across Language Families and Domains
Oct 09, 2025The rise of Large Language Models (LLMs) has redefined Machine Translation (MT), enabling context-aware and fluent translations across hundreds of languages and textual domains. Despite their remarkable capabilities, LLMs often exhibit uneven performance across language families and specialized domains. Moreover, recent evidence reveals that these models can encode and amplify different biases present in their training data, posing serious concerns for fairness, especially in low-resource languages. To address these gaps, we introduce Translation Tangles, a unified framework and dataset for evaluating the translation quality and fairness of open-source LLMs. Our approach benchmarks 24 bidirectional language pairs across multiple domains using different metrics. We further propose a hybrid bias detection pipeline that integrates rule-based heuristics, semantic similarity filtering, and LLM-based validation. We also introduce a high-quality, bias-annotated dataset based on human evaluations of 1,439 translation-reference pairs. The code and dataset are accessible on GitHub: https://github.com/faiyazabdullah/TranslationTangles
MosquitoMiner: A Light Weight Rover for Detecting and Eliminating Mosquito Breeding Sites
Sep 12, 2024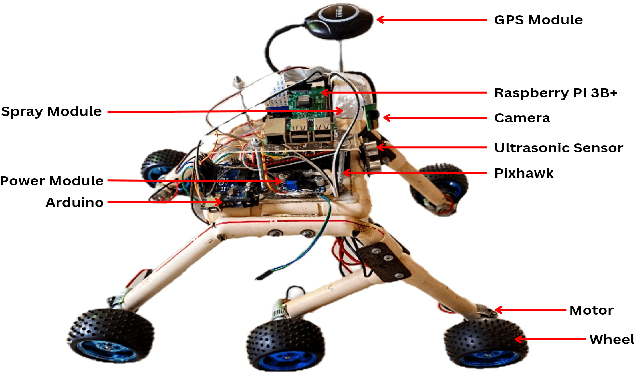
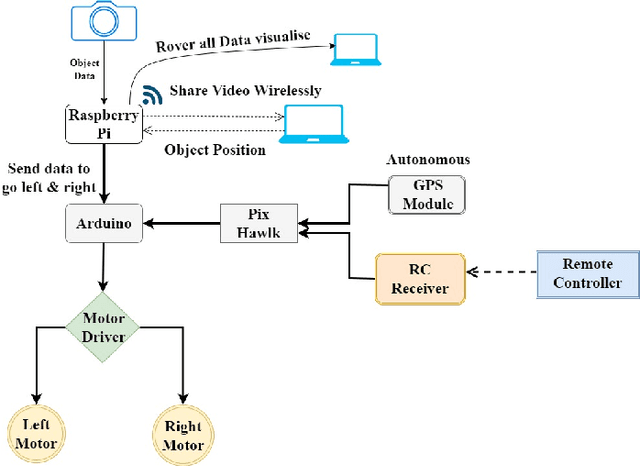


In this paper, we present a novel approach to the development and deployment of an autonomous mosquito breeding place detector rover with the object and obstacle detection capabilities to control mosquitoes. Mosquito-borne diseases continue to pose significant health threats globally, with conventional control methods proving slow and inefficient. Amidst rising concerns over the rapid spread of these diseases, there is an urgent need for innovative and efficient strategies to manage mosquito populations and prevent disease transmission. To mitigate the limitations of manual labor and traditional methods, our rover employs autonomous control strategies. Leveraging our own custom dataset, the rover can autonomously navigate along a pre-defined path, identifying and mitigating potential breeding grounds with precision. It then proceeds to eliminate these breeding grounds by spraying a chemical agent, effectively eradicating mosquito habitats. Our project demonstrates the effectiveness that is absent in traditional ways of controlling and safeguarding public health. The code for this project is available on GitHub at - https://github.com/faiyazabdullah/MosquitoMiner