 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid Model-Based and Model-Free Framework for Active Multi-View Viewpoint Optimization in Sonar Target Recognition
Jun 13, 2026This paper presents a hybrid model-based and model-free framework for active multi-view target recognition using forward-looking sonar. A convolutional neural network (CNN) provides data-driven observation likelihoods, while Radon-based orientation estimation enables viewpoint-aware sensing without requiring angle annotations. During training, an information-gain-based reward guides a Proximal Policy Optimization (PPO) agent to learn a belief-aware viewpoint selection policy offline. At deployment, the learned policy performs real-time viewpoint selection using only CNN-based belief updates, eliminating the need for computationally expensive online POMDP tree search. Experiments on a marine-debris forward-looking sonar dataset demonstrate that the proposed approach achieves competitive recognition accuracy while reducing sensing steps and motion cost compared to model-based baselines.
Point Cloud Structural Similarity-based Underwater Sonar Loop Detection
Sep 21, 2024


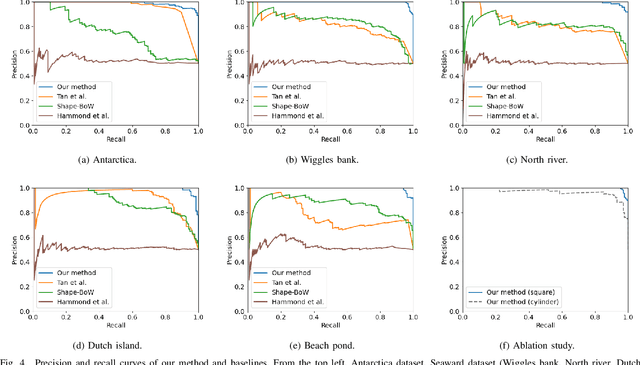
In order to enable autonomous navigation in underwater environments, a map needs to be created in advance using a Simultaneous Localization and Mapping (SLAM) algorithm that utilizes sensors like a sonar. At this time, loop closure is employed to reduce the pose error accumulated during the SLAM process. In the case of loop detection using a sonar, some previous studies have used a method of projecting the 3D point cloud into 2D, then extracting keypoints and matching them. However, during the 2D projection process, data loss occurs due to image resolution, and in monotonous underwater environments such as rivers or lakes, it is difficult to extract keypoints. Additionally, methods that use neural networks or are based on Bag of Words (BoW) have the disadvantage of requiring additional preprocessing tasks, such as training the model in advance or pre-creating a vocabulary. To address these issues, in this paper, we utilize the point cloud obtained from sonar data without any projection to prevent performance degradation due to data loss. Additionally, by calculating the point-wise structural feature map of the point cloud using mathematical formulas and comparing the similarity between point clouds, we eliminate the need for keypoint extraction and ensure that the algorithm can operate in new environments without additional learning or tasks. To evaluate the method, we validated the performance of the proposed algorithm using the Antarctica dataset obtained from deep underwater and the Seaward dataset collected from rivers and lakes. Experimental results show that our proposed method achieves the best loop detection performance in both datasets. Our code is available at https://github.com/donghwijung/point_cloud_structural_similarity_based_underwater_sonar_loop_detection.
Global Uncertainty-Aware Planning for Magnetic Anomaly-Based Navigation
Sep 16, 2024Navigating and localizing in partially observable, stochastic environments with magnetic anomalies presents significant challenges, especially when balancing the accuracy of state estimation and the stability of localization. Traditional approaches often struggle to maintain performance due to limited localization updates and dynamic conditions. This paper introduces a multi-objective global path planner for magnetic anomaly navigation (MagNav), which leverages entropy maps to assess spatial frequency variations in magnetic fields and identify high-information areas. The system generates paths toward these regions by employing a potential field planner, enhancing active localization. Hardware experiments demonstrate that the proposed method significantly improves localization stability and accuracy compared to existing active localization techniques. The results underscore the effectiveness of this method in reducing localization uncertainty and highlight its adaptability to various gradient-based navigation maps, including topographical and underwater depth-based environments.
Real-time Uncertainty-Aware Motion Planning for Magnetic-based Navigation
Jul 26, 2024



Localization in GPS-denied environments is critical for autonomous systems, and traditional methods like SLAM have limitations in generalizability across diverse environments. Magnetic-based navigation (MagNav) offers a robust solution by leveraging the ubiquity and unique anomalies of external magnetic fields. This paper proposes a real-time uncertainty-aware motion planning algorithm for MagNav, using onboard magnetometers and information-driven methodologies to adjust trajectories based on real-time localization confidence. This approach balances the trade-off between finding the shortest or most energy-efficient routes and reducing localization uncertainty, enhancing navigational accuracy and reliability. The novel algorithm integrates an uncertainty-driven framework with magnetic-based localization, creating a real-time adaptive system capable of minimizing localization errors in complex environments. Extensive simulations and real-world experiments validate the method, demonstrating significant reductions in localization uncertainty and the feasibility of real-time implementation. The paper also details the mathematical modeling of uncertainty, the algorithmic foundation of the planning approach, and the practical implications of using magnetic fields for localization. Future work includes incorporating a global path planner to address the local nature of the current guidance law, further enhancing the method's suitability for long-duration operations.
Modularis: Modular Underwater Robot for Rapid Development and Validation of Autonomous Systems
Jan 11, 2024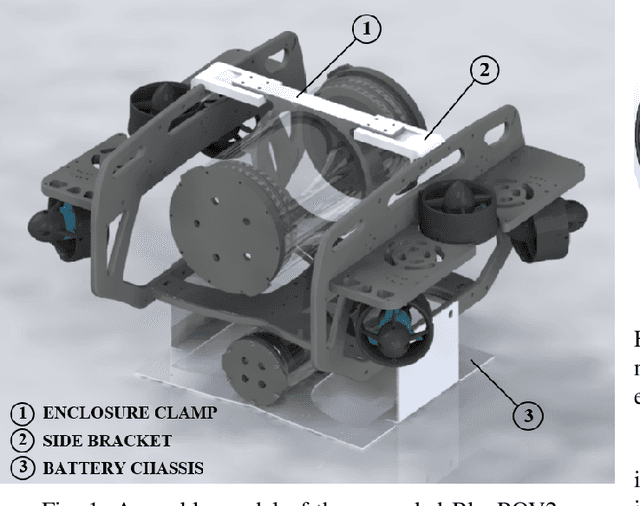
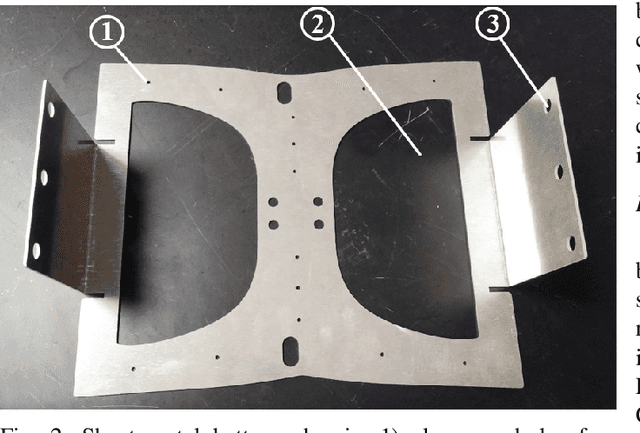
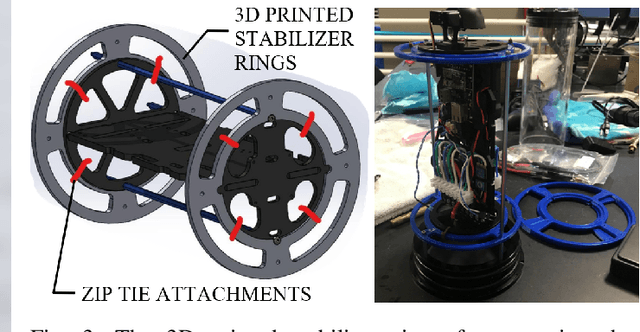
Autonomous underwater robots typically require higher cost and time for demonstrations compared to other domains due to the complexity of the environment. Due to the limited capacity and payload flexibility, it is challenging to find off-the-shelf underwater robots that are affordable, customizable, and subject to environmental variability. Custom-built underwater robots may be necessary for specialized applications or missions, but the process can be more costly and time-consuming than purchasing an off-the-shelf autonomous underwater vehicle (AUV). To address these challenges, we propose a modular underwater robot, Modularis, that can serve as an open-source testbed system. Our proposed system expedites the testing of perception, planning, and control algorithms.