 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModularis: Modular Underwater Robot for Rapid Development and Validation of Autonomous Systems
Paper and Code
Jan 11, 2024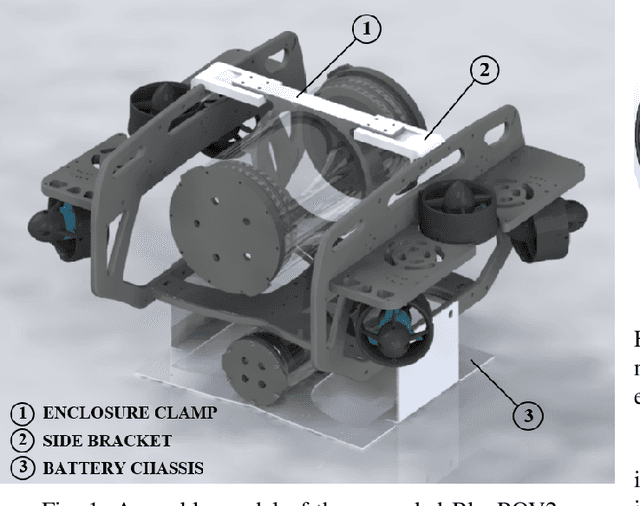
Autonomous underwater robots typically require higher cost and time for demonstrations compared to other domains due to the complexity of the environment. Due to the limited capacity and payload flexibility, it is challenging to find off-the-shelf underwater robots that are affordable, customizable, and subject to environmental variability. Custom-built underwater robots may be necessary for specialized applications or missions, but the process can be more costly and time-consuming than purchasing an off-the-shelf autonomous underwater vehicle (AUV). To address these challenges, we propose a modular underwater robot, Modularis, that can serve as an open-source testbed system. Our proposed system expedites the testing of perception, planning, and control algorithms.