 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMAGSAC++, a fast, reliable and accurate robust estimator
Dec 11, 2019


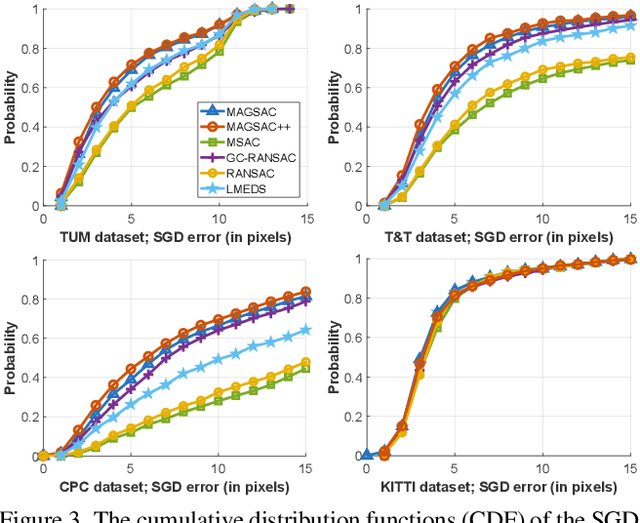
A new method for robust estimation, MAGSAC++, is proposed. It introduces a new model quality (scoring) function that does not require the inlier-outlier decision, and a novel marginalization procedure formulated as an iteratively re-weighted least-squares approach. We also propose a new sampler, Progressive NAPSAC, for RANSAC-like robust estimators. Exploiting the fact that nearby points often originate from the same model in real-world data, it finds local structures earlier than global samplers. The progressive transition from local to global sampling does not suffer from the weaknesses of purely localized samplers. On six publicly available real-world datasets for homography and fundamental matrix fitting, MAGSAC++ produces results superior to state-of-the-art robust methods. It is faster, more geometrically accurate and fails less often.
Online Adaptive Hidden Markov Model for Multi-Tracker Fusion
Mar 04, 2016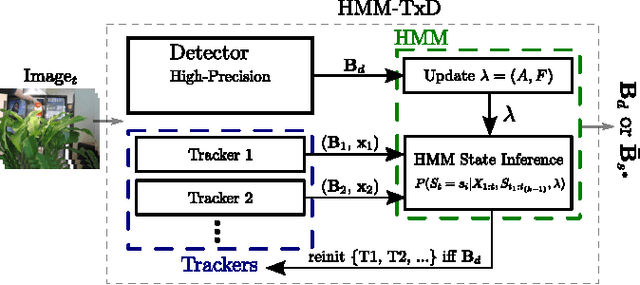
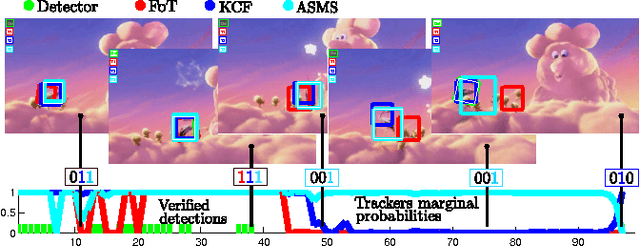
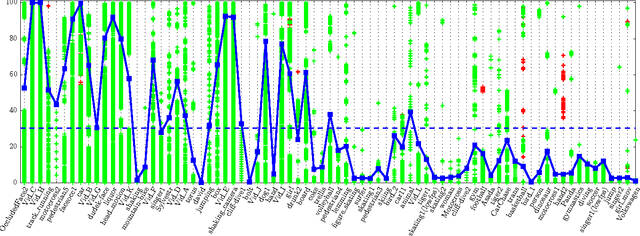
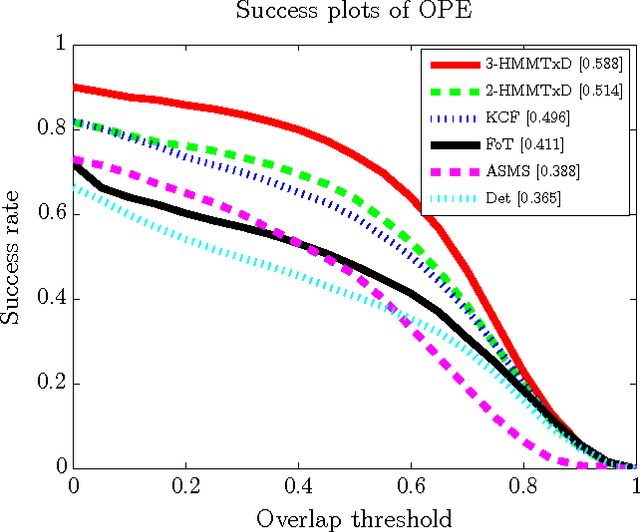
In this paper, we propose a novel method for visual object tracking called HMMTxD. The method fuses observations from complementary out-of-the box trackers and a detector by utilizing a hidden Markov model whose latent states correspond to a binary vector expressing the failure of individual trackers. The Markov model is trained in an unsupervised way, relying on an online learned detector to provide a source of tracker-independent information for a modified Baum- Welch algorithm that updates the model w.r.t. the partially annotated data. We show the effectiveness of the proposed method on combination of two and three tracking algorithms. The performance of HMMTxD is evaluated on two standard benchmarks (CVPR2013 and VOT) and on a rich collection of 77 publicly available sequences. The HMMTxD outperforms the state-of-the-art, often significantly, on all datasets in almost all criteria.