 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantification of Uncertainties in Deep Learning-based Environment Perception
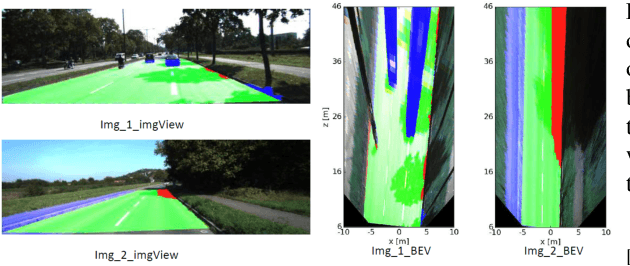
Jun 05, 2023In this work, we introduce a novel Deep Learning-based method to perceive the environment of a vehicle based on radar scans while accounting for uncertainties in its predictions. The environment of the host vehicle is segmented into equally sized grid cells which are classified individually. Complementary to the segmentation output, our Deep Learning-based algorithm is capable of differentiating uncertainties in its predictions as being related to an inadequate model (epistemic uncertainty) or noisy data (aleatoric uncertainty). To this end, weights are described as probability distributions accounting for uncertainties in the model parameters. Distributions are learned in a supervised fashion using gradient descent. We prove that uncertainties in the model output correlate with the precision of its predictions. Compared to previous concepts, we show superior performance of our approach to reliably perceive the environment of a vehicle.
Efficient fine-grained road segmentation using superpixel-based CNN and CRF models
Jun 22, 2022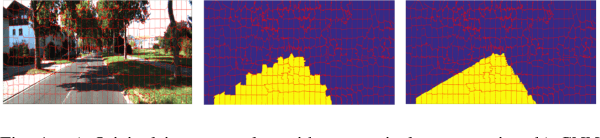
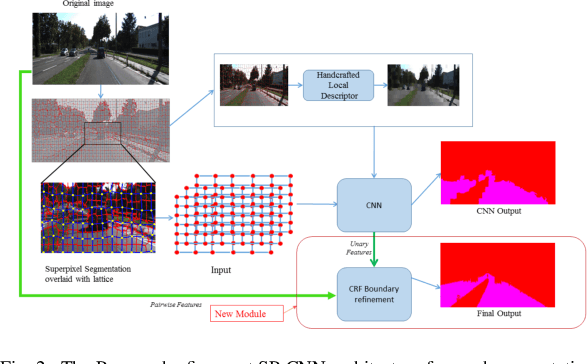
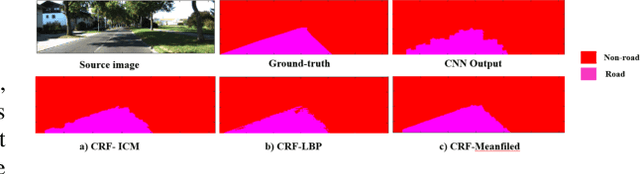
Towards a safe and comfortable driving, road scene segmentation is a rudimentary problem in camera-based advance driver assistance systems (ADAS). Despite of the great achievement of Convolutional Neural Networks (CNN) for semantic segmentation task, the high computational efforts of CNN based methods is still a challenging area. In recent work, we proposed a novel approach to utilise the advantages of CNNs for the task of road segmentation at reasonable computational effort. The runtime benefits from using irregular super pixels as basis for the input for the CNN rather than the image grid, which tremendously reduces the input size. Although, this method achieved remarkable low computational time in both training and testing phases, the lower resolution of the super pixel domain yields naturally lower accuracy compared to high cost state of the art methods. In this work, we focus on a refinement of the road segmentation utilising a Conditional Random Field (CRF).The refinement procedure is limited to the super pixels touching the predicted road boundary to keep the additional computational effort low. Reducing the input to the super pixel domain allows the CNNs structure to stay small and efficient to compute while keeping the advantage of convolutional layers and makes them eligible for ADAS. Applying CRF compensate the trade off between accuracy and computational efficiency. The proposed system obtained comparable performance among the top performing algorithms on the KITTI road benchmark and its fast inference makes it particularly suitable for realtime applications.