 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Diffusion Processes for Active Learning of Hyperspectral Images
Jan 08, 2021
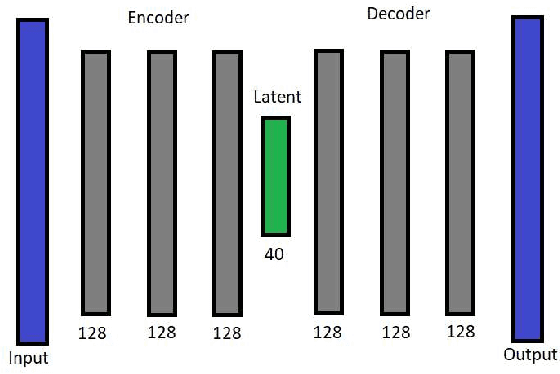
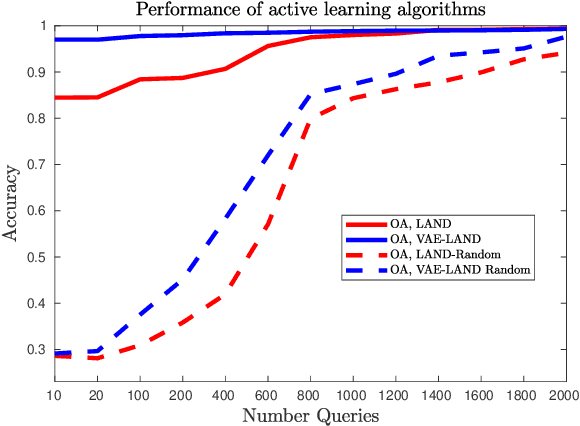
A method for active learning of hyperspectral images (HSI) is proposed, which combines deep learning with diffusion processes on graphs. A deep variational autoencoder extracts smoothed, denoised features from a high-dimensional HSI, which are then used to make labeling queries based on graph diffusion processes. The proposed method combines the robust representations of deep learning with the mathematical tractability of diffusion geometry, and leads to strong performance on real HSI.
Balancing Geometry and Density: Path Distances on High-Dimensional Data
Dec 17, 2020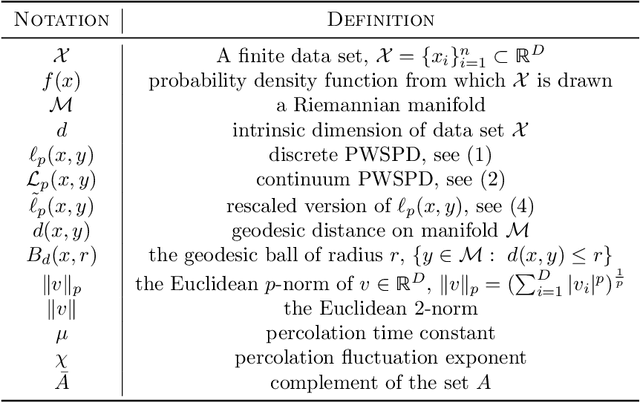
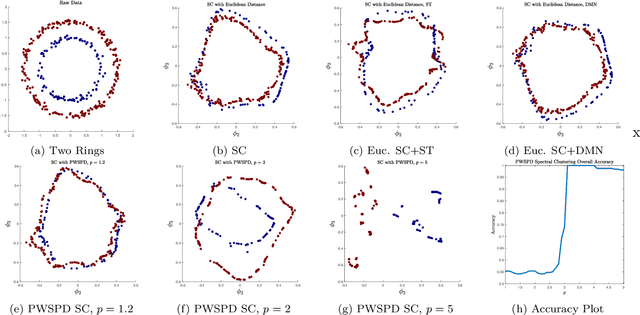
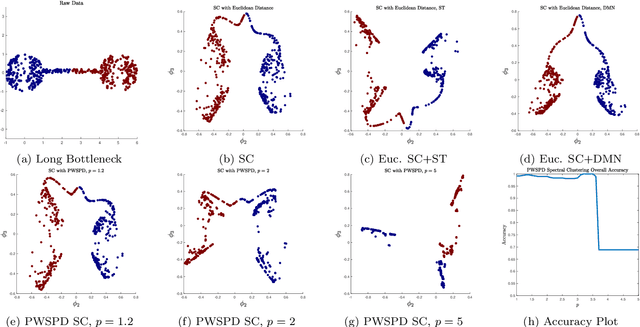
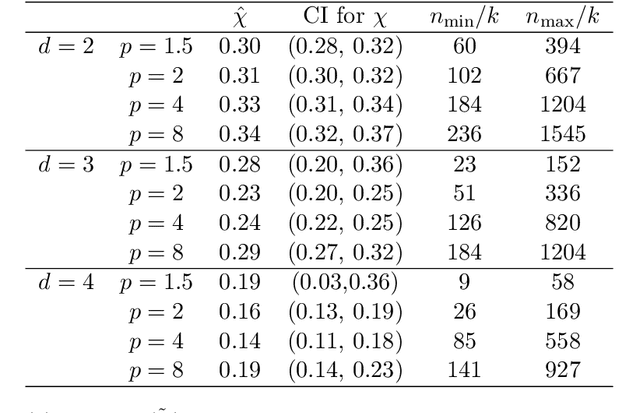
New geometric and computational analyses of power-weighted shortest-path distances (PWSPDs) are presented. By illuminating the way these metrics balance density and geometry in the underlying data, we clarify their key parameters and discuss how they may be chosen in practice. Comparisons are made with related data-driven metrics, which illustrate the broader role of density in kernel-based unsupervised and semi-supervised machine learning. Computationally, we relate PWSPDs on complete weighted graphs to their analogues on weighted nearest neighbor graphs, providing high probability guarantees on their equivalence that are near-optimal. Connections with percolation theory are developed to establish estimates on the bias and variance of PWSPDs in the finite sample setting. The theoretical results are bolstered by illustrative experiments, demonstrating the versatility of PWSPDs for a wide range of data settings. Throughout the paper, our results require only that the underlying data is sampled from a low-dimensional manifold, and depend crucially on the intrinsic dimension of this manifold, rather than its ambient dimension.
Map matching when the map is wrong: Efficient vehicle tracking on- and off-road for map learning
Sep 25, 2018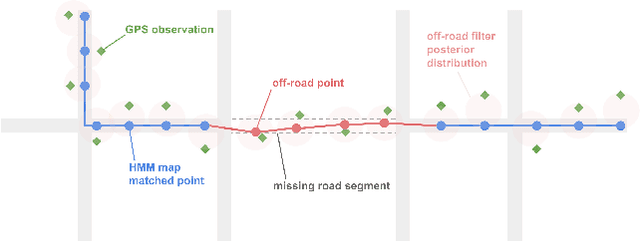
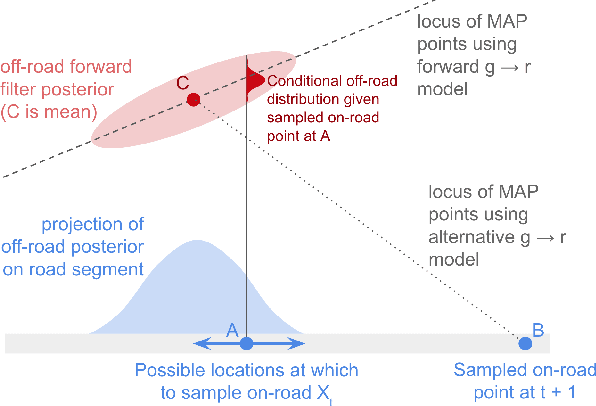
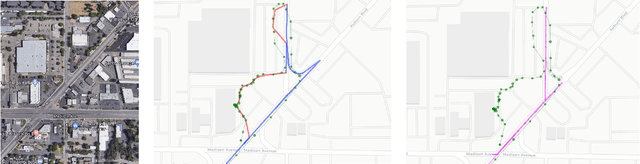
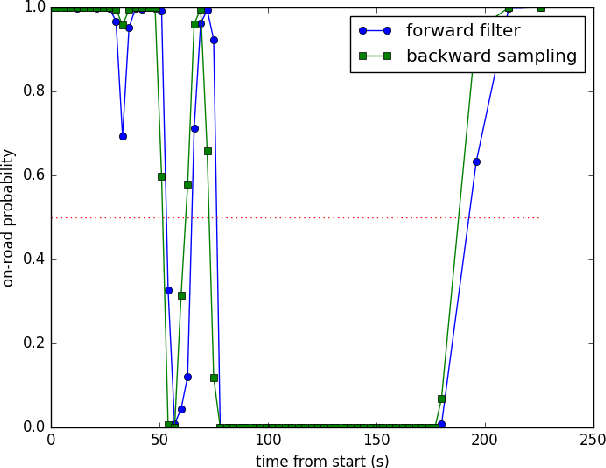
Map matching is a key part of many GIS applications, linking observed GPS traces to road networks via a map. But when that map contains errors such as missing or mislabeled roads, map matching can give poor or even misleading results. Here, an approach to tracking vehicles able to move both on and off known road networks is introduced that efficiently unifies existing hidden Markov model (HMM) approaches for map matching and standard free-space tracking methods (e.g. Kalman smoothing) in a principled way. In addition to avoiding generating misleading map-matching output, this approach has applications in learning map information from GPS traces, for example detecting unmapped or incorrectly mapped roads and parking lots. The approach is a form of interacting multiple model (IMM) filter subject to an additional assumption on the type of model interaction permitted. This allows an efficient formulation, here termed a semi-interacting multiple model (sIMM) filter. A forward filter (suitable for realtime tracking) and backward MAP sampling step (suitable for MAP trajectory inference and map matching) are described. The framework set out here is agnostic to the specific tracking models used, and makes clear how to replace these components with others of a similar type.