 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic classification of deformable shapes
Nov 04, 2022Let $\mathcal{D}$ be a dataset of smooth 3D-surfaces, partitioned into disjoint classes $\mathit{CL}_j$, $j= 1, \ldots, k$. We show how optimized diffeomorphic registration applied to large numbers of pairs $S,S' \in \mathcal{D}$ can provide descriptive feature vectors to implement automatic classification on $\mathcal{D}$, and generate classifiers invariant by rigid motions in $\mathbb{R}^3$. To enhance accuracy of automatic classification, we enrich the smallest classes $\mathit{CL}_j$ by diffeomorphic interpolation of smooth surfaces between pairs $S,S' \in \mathit{CL}_j$. We also implement small random perturbations of surfaces $S\in \mathit{CL}_j$ by random flows of smooth diffeomorphisms $F_t:\mathbb{R}^3 \to \mathbb{R}^3$. Finally, we test our automatic classification methods on a cardiology data base of discretized mitral valve surfaces.
LAP: a Linearize and Project Method for Solving Inverse Problems with Coupled Variables
Jun 14, 2018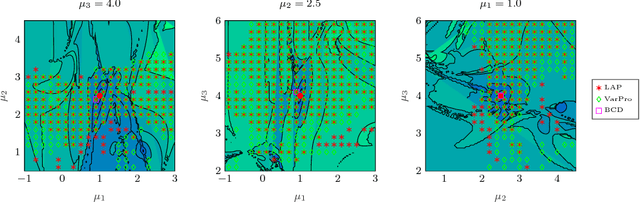
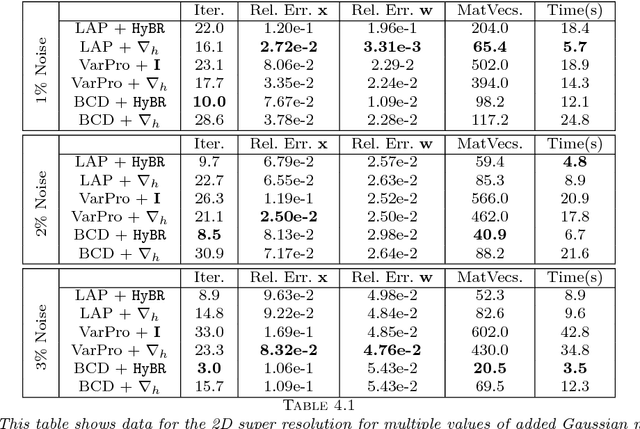


Many inverse problems involve two or more sets of variables that represent different physical quantities but are tightly coupled with each other. For example, image super-resolution requires joint estimation of the image and motion parameters from noisy measurements. Exploiting this structure is key for efficiently solving these large-scale optimization problems, which are often ill-conditioned. In this paper, we present a new method called Linearize And Project (LAP) that offers a flexible framework for solving inverse problems with coupled variables. LAP is most promising for cases when the subproblem corresponding to one of the variables is considerably easier to solve than the other. LAP is based on a Gauss-Newton method, and thus after linearizing the residual, it eliminates one block of variables through projection. Due to the linearization, this block can be chosen freely. Further, LAP supports direct, iterative, and hybrid regularization as well as constraints. Therefore LAP is attractive, e.g., for ill-posed imaging problems. These traits differentiate LAP from common alternatives for this type of problem such as variable projection (VarPro) and block coordinate descent (BCD). Our numerical experiments compare the performance of LAP to BCD and VarPro using three coupled problems whose forward operators are linear with respect to one block and nonlinear for the other set of variables.