 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeElectromagnets Under the Table: an Unobtrusive Magnetic Navigation System for Microsurgery
Aug 23, 2023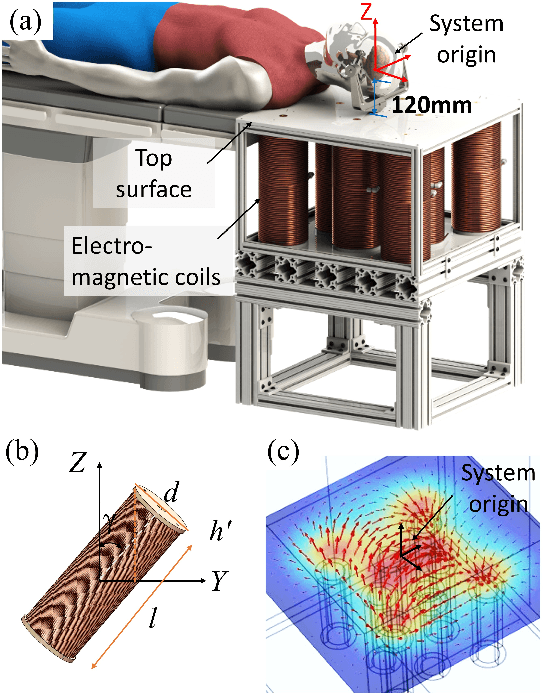
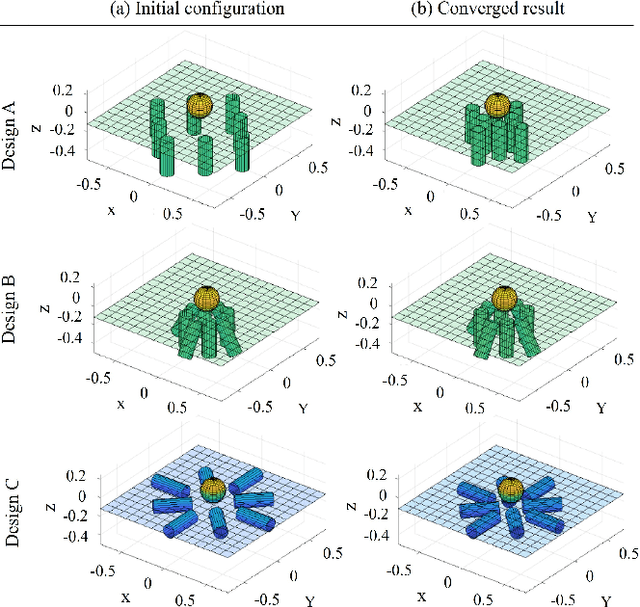
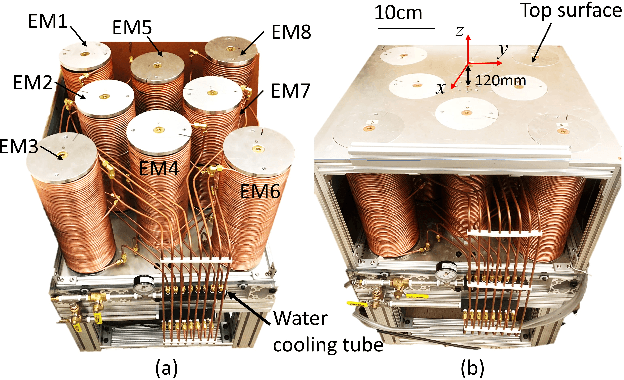
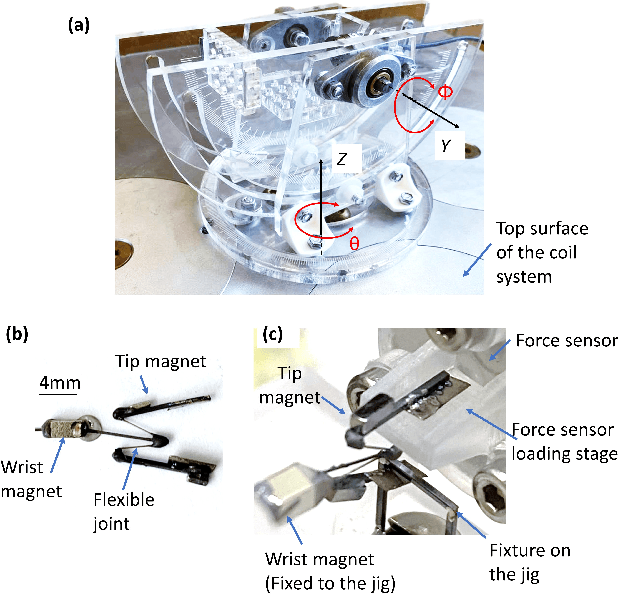
Miniature magnetic tools have the potential to enable minimally invasive surgical techniques to be applied to space-restricted surgical procedures in areas such as neurosurgery. However, typical magnetic navigation systems, which create the magnetic fields to drive such tools, either cannot generate large enough fields, or surround the patient in a way that obstructs surgeon access to the patient. This paper introduces the design of a magnetic navigation system with eight electromagnets arranged completely under the operating table, to endow the system with maximal workspace accessibility, which allows the patient to lie down on the top surface of the system without any constraints. The found optimal geometric layout of the electromagnets maximizes the field strength and uniformity over a reasonable neurosurgical operating volume. The system can generate non-uniform magnetic fields up to 38 mT along the x and y axes and 47 mT along the z axis at a working distance of 120 mm away from the actuation system workbench, deep enough to deploy magnetic microsurgical tools in the brain. The forces which can be exerted on millimeter-scale magnets used in prototype neurosurgical tools are validated experimentally. Due to its large workspace, this system could be used to control milli-robots in a variety of surgical applications.
Anatomical Mesh-Based Virtual Fixtures for Surgical Robots
Jun 03, 2020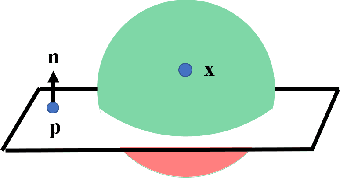
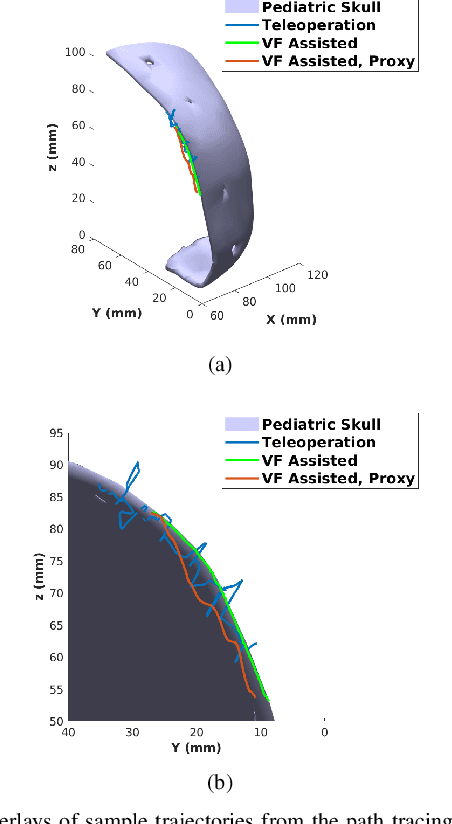
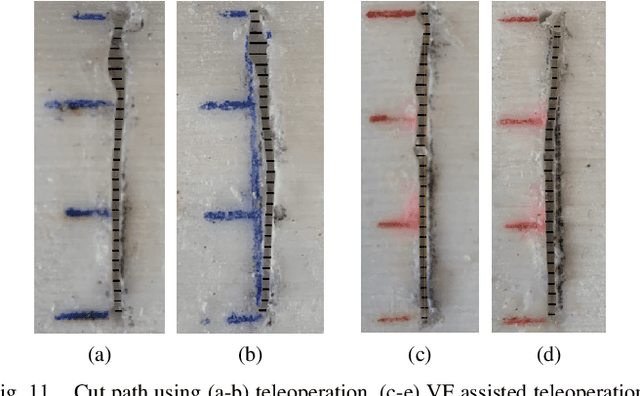
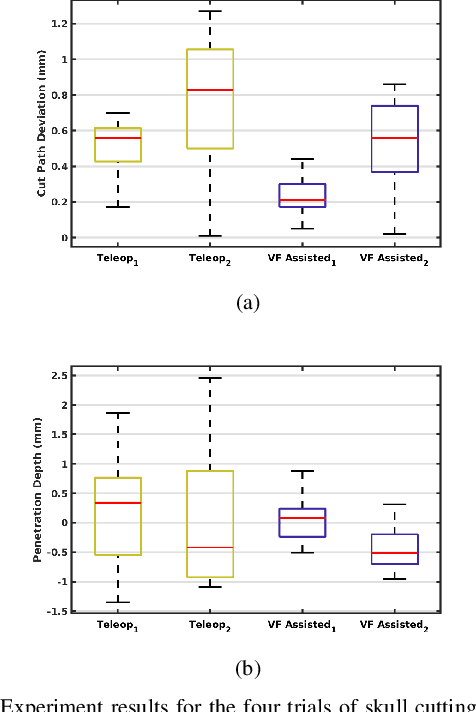
This paper presents a dynamic constraint formulation to provide protective virtual fixtures of 3D anatomical structures from polygon mesh representations. The proposed approach can anisotropically limit the tool motion of surgical robots without any assumption of the local anatomical shape close to the tool. Using a bounded search strategy and Principle Directed tree, the proposed system can run efficiently at 180 Hz for a mesh object containing 989,376 triangles and 493,460 vertices. The proposed algorithm has been validated in both simulation and skull cutting experiments. The skull cutting experiment setup uses a novel piezoelectric bone cutting tool designed for the da Vinci research kit. The result shows that the virtual fixture assisted teleoperation has statistically significant improvements in the cutting path accuracy and penetration depth control.