 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Pixels to Urban Policy-Intelligence: Recovering Legacy Effects of Redlining with a Multimodal LLM
Sep 18, 2025


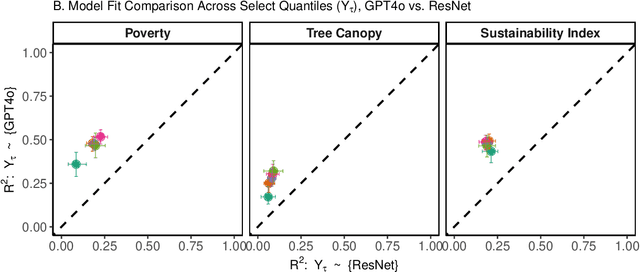
This paper shows how a multimodal large language model (MLLM) can expand urban measurement capacity and support tracking of place-based policy interventions. Using a structured, reason-then-estimate pipeline on street-view imagery, GPT-4o infers neighborhood poverty and tree canopy, which we embed in a quasi-experimental design evaluating the legacy of 1930s redlining. GPT-4o recovers the expected adverse socio-environmental legacy effects of redlining, with estimates statistically indistinguishable from authoritative sources, and it outperforms a conventional pixel-based segmentation baseline-consistent with the idea that holistic scene reasoning extracts higher-order information beyond object counts alone. These results position MLLMs as policy-grade instruments for neighborhood measurement and motivate broader validation across policy-evaluation settings.
Electromagnets Under the Table: an Unobtrusive Magnetic Navigation System for Microsurgery
Aug 23, 2023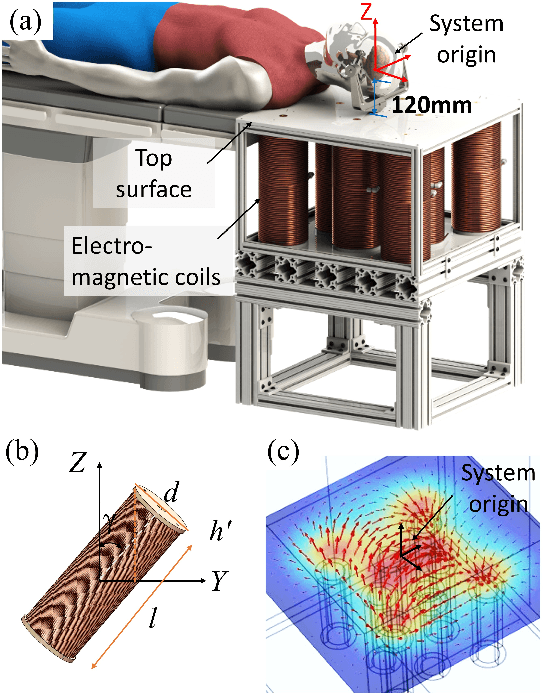
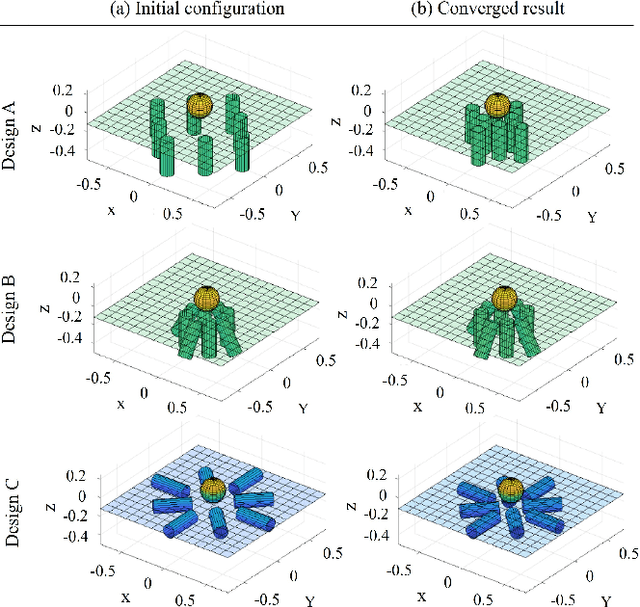
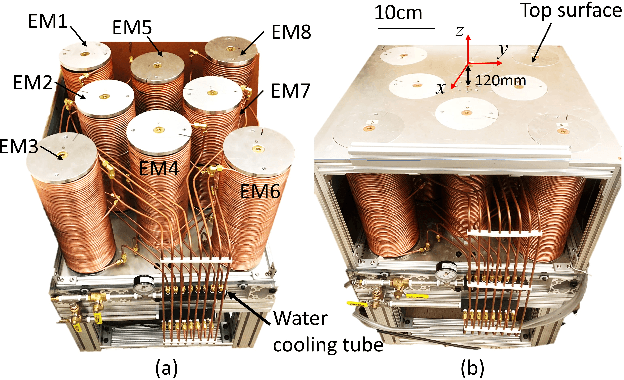
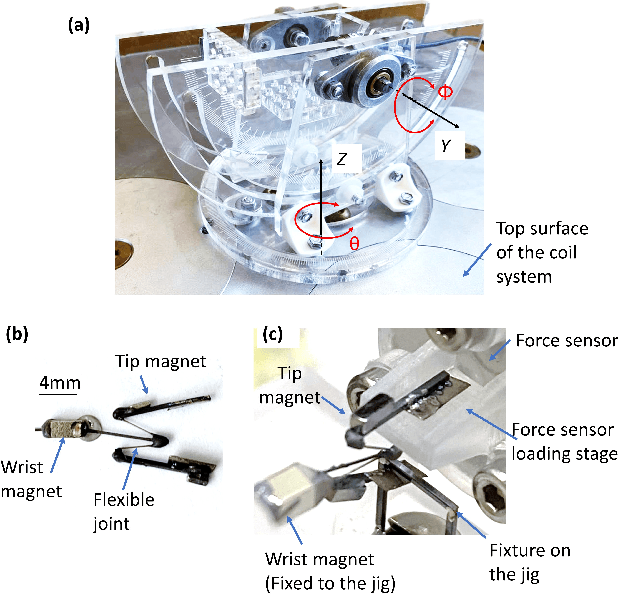
Miniature magnetic tools have the potential to enable minimally invasive surgical techniques to be applied to space-restricted surgical procedures in areas such as neurosurgery. However, typical magnetic navigation systems, which create the magnetic fields to drive such tools, either cannot generate large enough fields, or surround the patient in a way that obstructs surgeon access to the patient. This paper introduces the design of a magnetic navigation system with eight electromagnets arranged completely under the operating table, to endow the system with maximal workspace accessibility, which allows the patient to lie down on the top surface of the system without any constraints. The found optimal geometric layout of the electromagnets maximizes the field strength and uniformity over a reasonable neurosurgical operating volume. The system can generate non-uniform magnetic fields up to 38 mT along the x and y axes and 47 mT along the z axis at a working distance of 120 mm away from the actuation system workbench, deep enough to deploy magnetic microsurgical tools in the brain. The forces which can be exerted on millimeter-scale magnets used in prototype neurosurgical tools are validated experimentally. Due to its large workspace, this system could be used to control milli-robots in a variety of surgical applications.