 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproved Calibration of Numerical Integration Error in Sigma-Point Filters
Nov 28, 2018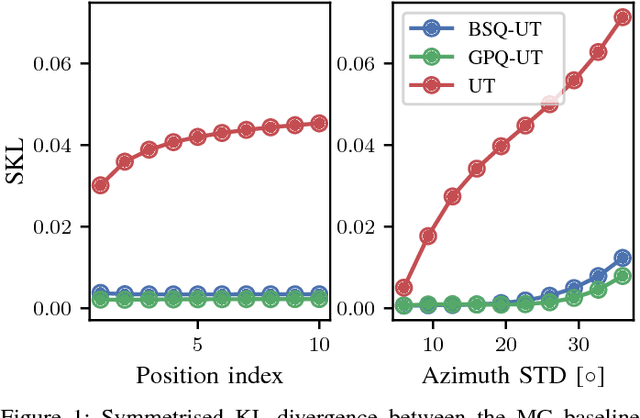

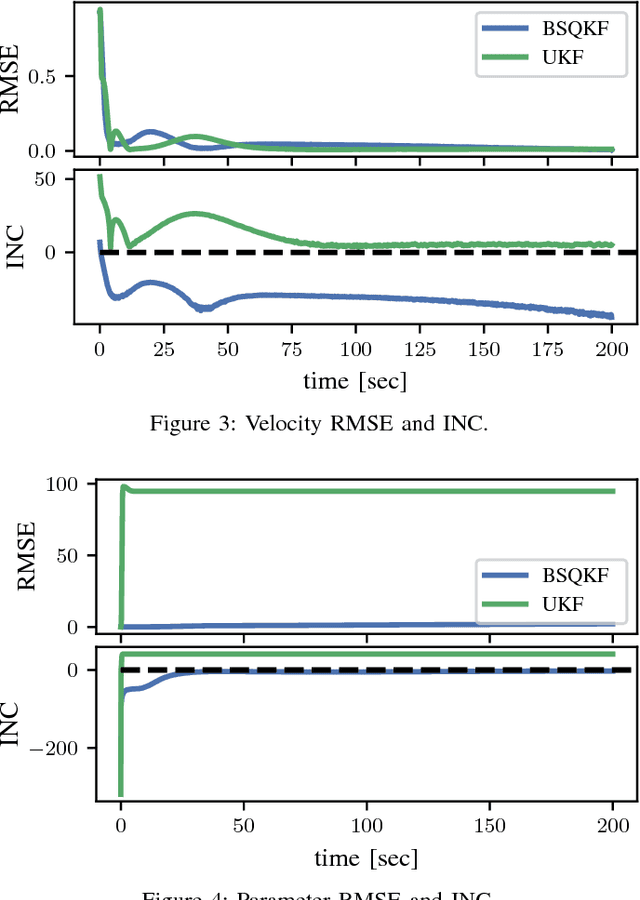

The sigma-point filters, such as the UKF, which exploit numerical quadrature to obtain an additional order of accuracy in the moment transformation step, are popular alternatives to the ubiquitous EKF. The classical quadrature rules used in the sigma-point filters are motivated via polynomial approximation of the integrand, however in the applied context these assumptions cannot always be justified. As a result, quadrature error can introduce bias into estimated moments, for which there is no compensatory mechanism in the classical sigma-point filters. This can lead in turn to estimates and predictions that are poorly calibrated. In this article, we investigate the Bayes-Sard quadrature method in the context of sigma-point filters, which enables uncertainty due to quadrature error to be formalised within a probabilistic model. Our first contribution is to derive the well-known classical quadratures as special cases of the Bayes-Sard quadrature method. Then a general-purpose moment transform is developed and utilised in the design of novel sigma-point filters, so that uncertainty due to quadrature error is explicitly quantified. Numerical experiments on a challenging tracking example with misspecified initial conditions show that the additional uncertainty quantification built into our method leads to better-calibrated state estimates with improved RMSE.
Student-t Process Quadratures for Filtering of Non-Linear Systems with Heavy-Tailed Noise
Mar 16, 2017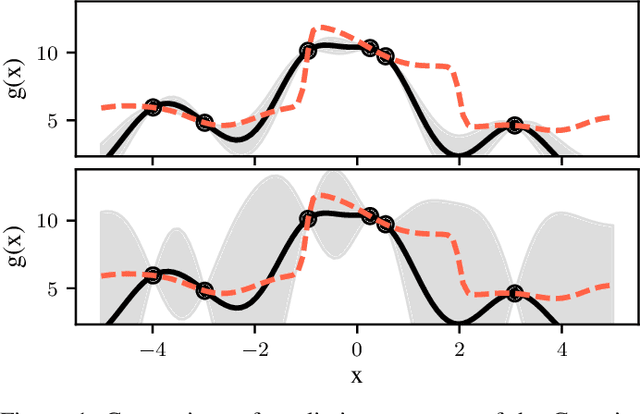
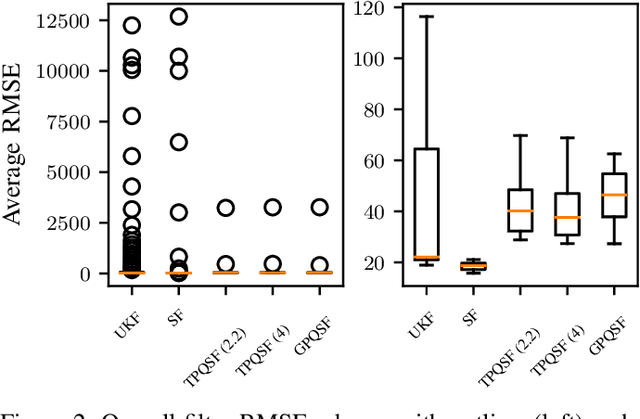
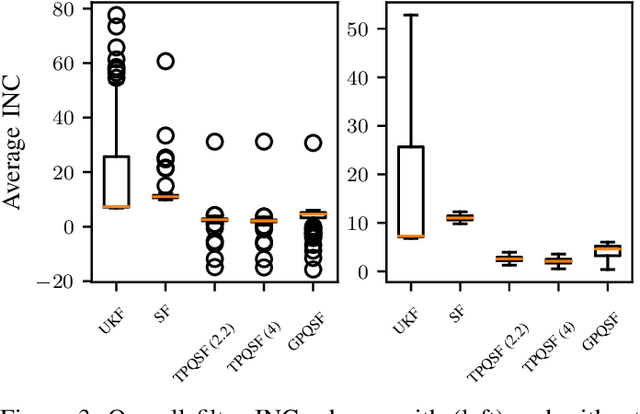
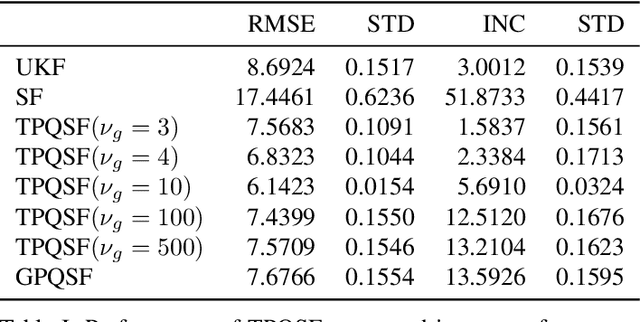
The aim of this article is to design a moment transformation for Student- t distributed random variables, which is able to account for the error in the numerically computed mean. We employ Student-t process quadrature, an instance of Bayesian quadrature, which allows us to treat the integral itself as a random variable whose variance provides information about the incurred integration error. Advantage of the Student- t process quadrature over the traditional Gaussian process quadrature, is that the integral variance depends also on the function values, allowing for a more robust modelling of the integration error. The moment transform is applied in nonlinear sigma-point filtering and evaluated on two numerical examples, where it is shown to outperform the state-of-the-art moment transforms.
Gaussian Process Quadrature Moment Transform
Jan 05, 2017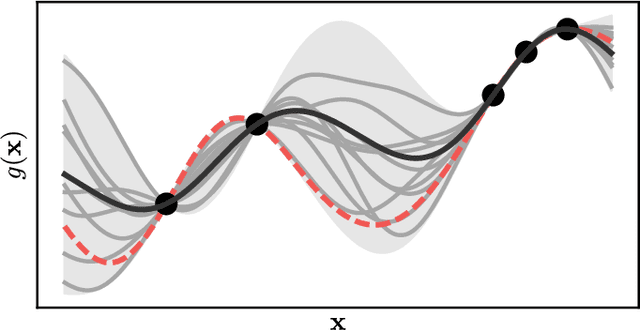


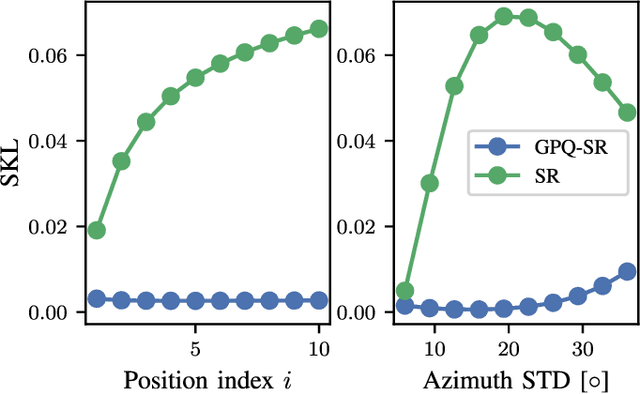
Computation of moments of transformed random variables is a problem appearing in many engineering applications. The current methods for moment transformation are mostly based on the classical quadrature rules which cannot account for the approximation errors. Our aim is to design a method for moment transformation for Gaussian random variables which accounts for the error in the numerically computed mean. We employ an instance of Bayesian quadrature, called Gaussian process quadrature (GPQ), which allows us to treat the integral itself as a random variable, where the integral variance informs about the incurred integration error. Experiments on the coordinate transformation and nonlinear filtering examples show that the proposed GPQ moment transform performs better than the classical transforms.