 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic Systems
Sep 17, 2024

Tracking controllers enable robotic systems to accurately follow planned reference trajectories. In particular, reinforcement learning (RL) has shown promise in the synthesis of controllers for systems with complex dynamics and modest online compute budgets. However, the poor sample efficiency of RL and the challenges of reward design make training slow and sometimes unstable, especially for high-dimensional systems. In this work, we leverage the inherent Lie group symmetries of robotic systems with a floating base to mitigate these challenges when learning tracking controllers. We model a general tracking problem as a Markov decision process (MDP) that captures the evolution of both the physical and reference states. Next, we prove that symmetry in the underlying dynamics and running costs leads to an MDP homomorphism, a mapping that allows a policy trained on a lower-dimensional "quotient" MDP to be lifted to an optimal tracking controller for the original system. We compare this symmetry-informed approach to an unstructured baseline, using Proximal Policy Optimization (PPO) to learn tracking controllers for three systems: the Particle (a forced point mass), the Astrobee (a fullyactuated space robot), and the Quadrotor (an underactuated system). Results show that a symmetry-aware approach both accelerates training and reduces tracking error after the same number of training steps.
Almost Global Asymptotic Trajectory Tracking for Fully-Actuated Mechanical Systems on Homogeneous Riemannian Manifolds
Mar 07, 2024In this work, we address the design of tracking controllers that drive a mechanical system's state asymptotically towards a reference trajectory. Motivated by aerospace and robotics applications, we consider fully-actuated systems evolving on the broad class of homogeneous spaces (encompassing all vector spaces, Lie groups, and spheres of any dimension). In this setting, the transitive action of a Lie group on the configuration manifold enables an intrinsic description of the tracking error as an element of the state space, even in the absence of a group structure on the configuration manifold itself (e.g., for $\mathbb{S}^2$). Such an error state facilitates the design of a generalized control policy depending smoothly on state and time that drives this geometric tracking error to a designated origin from almost every initial condition, thereby guaranteeing almost global convergence to the reference trajectory. Moreover, the proposed controller simplifies naturally when specialized to a Lie group or the $n$-sphere. In summary, we propose a unified, intrinsic controller guaranteeing almost global asymptotic trajectory tracking for fully-actuated mechanical systems evolving on a broader class of manifolds. We apply the method to an axisymmetric satellite and an omnidirectional aerial robot.
Towards Automatic Identification of Globally Valid Geometric Flat Outputs via Numerical Optimization
May 16, 2023Differential flatness enables efficient planning and control for underactuated robotic systems, but we lack a systematic and practical means of identifying a flat output (or determining whether one exists) for an arbitrary robotic system. In this work, we leverage recent results elucidating the role of symmetry in constructing flat outputs for free-flying robotic systems. Using the tools of Riemannian geometry, Lie group theory, and differential forms, we cast the search for a globally valid, equivariant flat output as an optimization problem. An approximate transcription of this continuum formulation to a quadratic program is performed, and its solutions for two example systems achieve precise agreement with the known closed-form flat outputs. Our results point towards a systematic, automated approach to numerically identify geometric flat outputs directly from the system model, particularly useful when complexity renders pen and paper analysis intractable.
A Compositional Approach to Certifying the Almost Global Asymptotic Stability of Cascade Systems
Apr 06, 2023

In this work, we give sufficient conditions for the almost global asymptotic stability of a cascade in which the inner loop and the unforced outer loop are each almost globally asymptotically stable. Our qualitative approach relies on the absence of chain recurrence for non-equilibrium points of the unforced outer loop, the hyperbolicity of equilibria, and the precompactness of forward trajectories. The result is extended inductively to upper triangular systems with an arbitrary number of subsystems. We show that the required structure of the chain recurrent set can be readily verified, and describe two important classes of systems with this property. We also show that the precompactness requirement can be verified by growth rate conditions on the interconnection term coupling the subsystems. Our results stand in contrast to prior works that require either global asymptotic stability of the subsystems (impossible for smooth systems evolving on general manifolds), time scale separation between the subsystems, or strong disturbance robustness properties of the outer loop. The approach has clear applications in stability certification of cascaded controllers for systems evolving on manifolds.
The Role of Symmetry in Constructing Geometric Flat Outputs for Free-Flying Robotic Systems
Sep 23, 2022
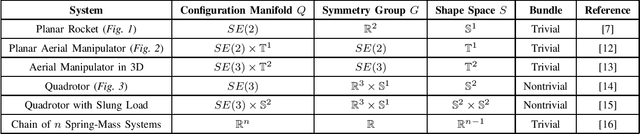
Mechanical systems naturally evolve on principal bundles describing their inherent symmetries. The ensuing factorization of the configuration manifold into a symmetry group and an internal shape space has provided deep insights into the locomotion of many robotic and biological systems. On the other hand, the property of differential flatness has enabled efficient, effective planning and control algorithms for various robotic systems. Yet, a practical means of finding a flat output for an arbitrary robotic system remains an open question. In this work, we demonstrate surprising new connections between these two domains, for the first time employing symmetry directly to construct a flat output. We provide sufficient conditions for the existence of a trivialization of the bundle in which the group variables themselves are a flat output. We call this a geometric flat output, since it is equivariant (i.e. maintains the symmetry) and is often global or almost-global, properties not typically enjoyed by other flat outputs. In such a trivialization, the motion planning problem is easily solved, since a given trajectory for the group variables will fully determine the trajectory for the shape variables that exactly achieves this motion. We provide a partial catalog of robotic systems with geometric flat outputs and worked examples for the planar rocket, planar aerial manipulator, and quadrotor.