 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePractical application improvement to Quantum SVM: theory to practice
Dec 14, 2020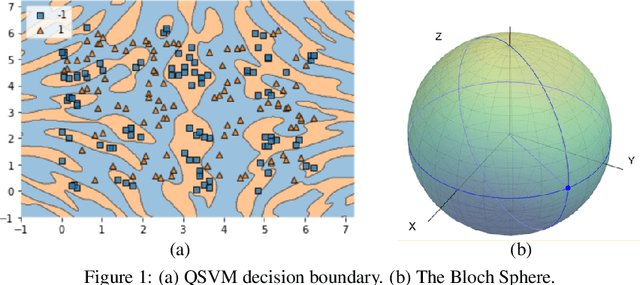
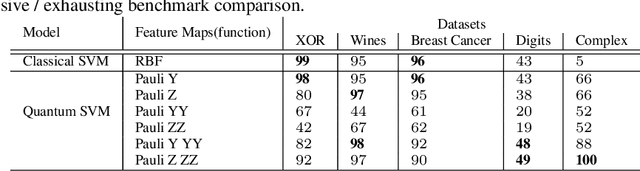
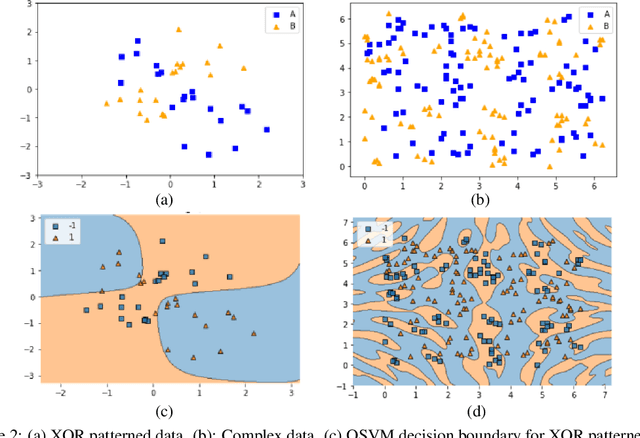
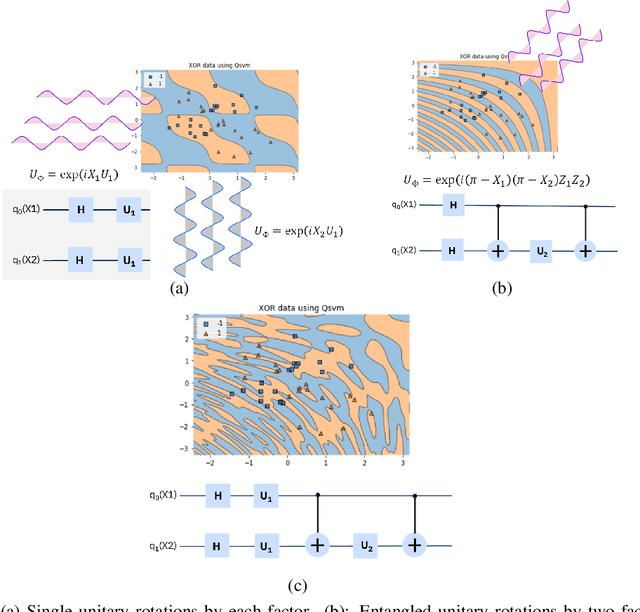
Quantum machine learning (QML) has emerged as an important area for Quantum applications, although useful QML applications would require many qubits. Therefore our paper is aimed at exploring the successful application of the Quantum Support Vector Machine (QSVM) algorithm while balancing several practical and technical considerations under the Noisy Intermediate-Scale Quantum (NISQ) assumption. For the quantum SVM under NISQ, we use quantum feature maps to translate data into quantum states and build the SVM kernel out of these quantum states, and further compare with classical SVM with radial basis function (RBF) kernels. As data sets are more complex or abstracted in some sense, classical SVM with classical kernels leads to less accuracy compared to QSVM, as classical SVM with typical classical kernels cannot easily separate different class data. Similarly, QSVM should be able to provide competitive performance over a broader range of data sets including ``simpler'' data cases in which smoother decision boundaries are required to avoid any model variance issues (i.e., overfitting). To bridge the gap between ``classical-looking'' decision boundaries and complex quantum decision boundaries, we propose to utilize general shallow unitary transformations to create feature maps with rotation factors to define a tunable quantum kernel, and added regularization to smooth the separating hyperplane model. We show in experiments that this allows QSVM to perform equally to SVM regardless of the complexity of the data sets and outperform in some commonly used reference data sets.
Automatic LiDAR Extrinsic Calibration System using Photodetector and Planar Board for Large-scale Applications
Aug 24, 2020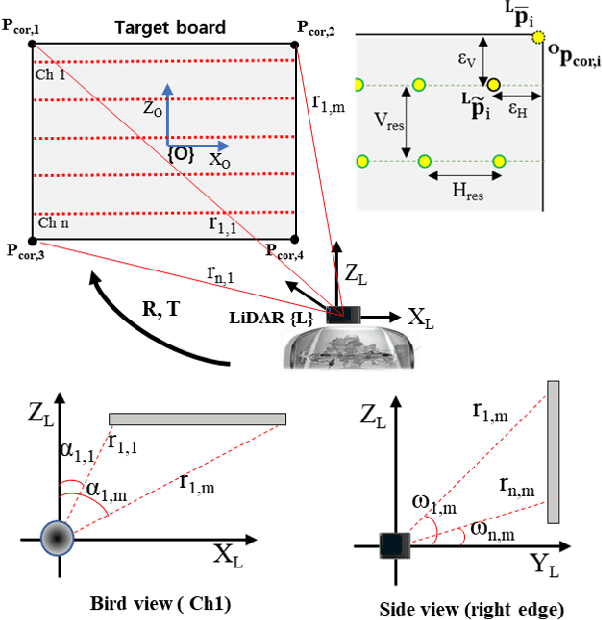
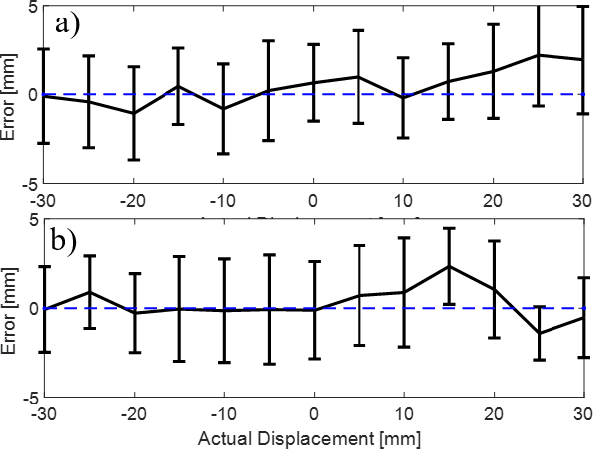
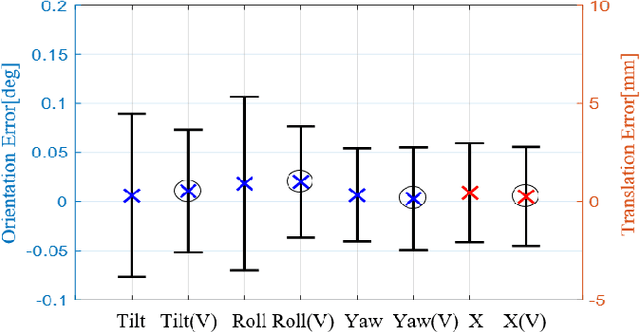
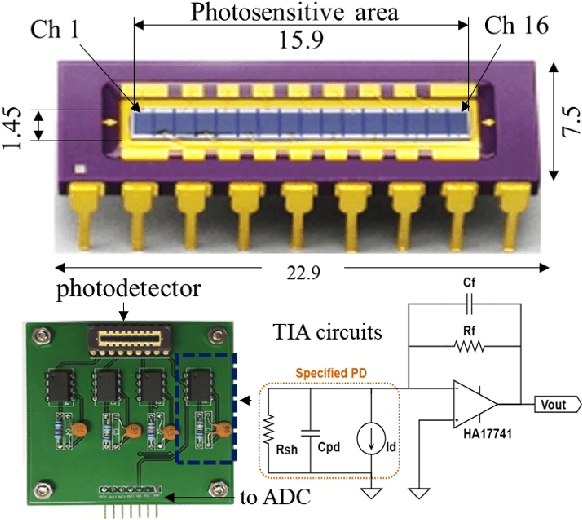
This paper presents a novel automatic calibration system to estimate the extrinsic parameters of LiDAR mounted on a mobile platform for sensor misalignment inspection in the large-scale production of highly automated vehicles. To obtain subdegree and subcentimeter accuracy levels of extrinsic calibration, this study proposed a new concept of a target board with embedded photodetector arrays, named the PD-target system, to find the precise position of the correspondence laser beams on the target surface. Furthermore, the proposed system requires only the simple design of the target board at the fixed pose in a close range to be readily applicable in the automobile manufacturing environment. The experimental evaluation of the proposed system on low-resolution LiDAR showed that the LiDAR offset pose can be estimated within 0.1 degree and 3 mm levels of precision. The high accuracy and simplicity of the proposed calibration system make it practical for large-scale applications for the reliability and safety of autonomous systems.