 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFRDet: Balanced and Lightweight Object Detector based on Fire-Residual Modules for Embedded Processor of Autonomous Driving
Nov 16, 2020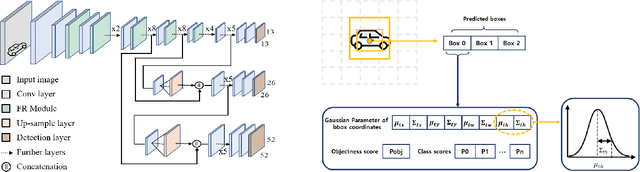
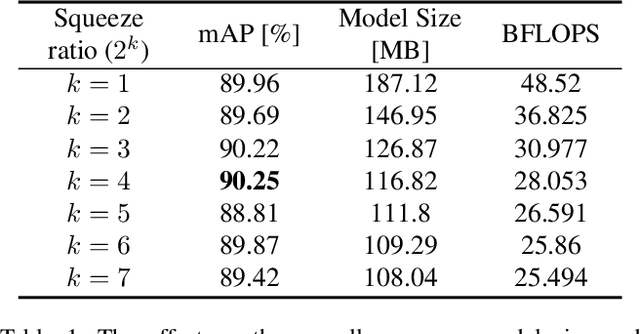
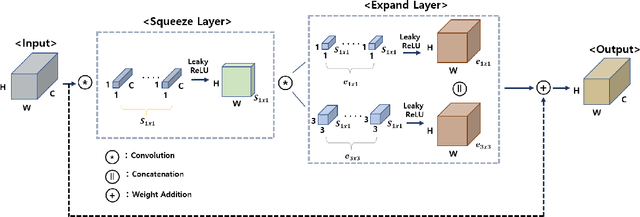
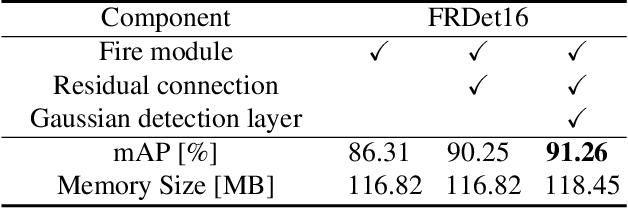
For deployment on an embedded processor for autonomous driving, the object detection network should satisfy all of the accuracy, real-time inference, and light model size requirements. Conventional deep CNN-based detectors aim for high accuracy, making their model size heavy for an embedded system with limited memory space. In contrast, lightweight object detectors are greatly compressed but at a significant sacrifice of accuracy. Therefore, we propose FRDet, a lightweight one-stage object detector that is balanced to satisfy all the constraints of accuracy, model size, and real-time processing on an embedded GPU processor for autonomous driving applications. Our network aims to maximize the compression of the model while achieving or surpassing YOLOv3 level of accuracy. This paper proposes the Fire-Residual (FR) module to design a lightweight network with low accuracy loss by adapting fire modules with residual skip connections. In addition, the Gaussian uncertainty modeling of the bounding box is applied to further enhance the localization accuracy. Experiments on the KITTI dataset showed that FRDet reduced the memory size by 50.8% but achieved higher accuracy by 1.12% mAP compared to YOLOv3. Moreover, the real-time detection speed reached 31.3 FPS on an embedded GPU board(NVIDIA Xavier). The proposed network achieved higher compression with comparable accuracy compared to other deep CNN object detectors while showing improved accuracy than the lightweight detector baselines. Therefore, the proposed FRDet is a well-balanced and efficient object detector for practical application in autonomous driving that can satisfies all the criteria of accuracy, real-time inference, and light model size.
Accurate Alignment Inspection System for Low-resolution Automotive and Mobility LiDAR
Aug 24, 2020
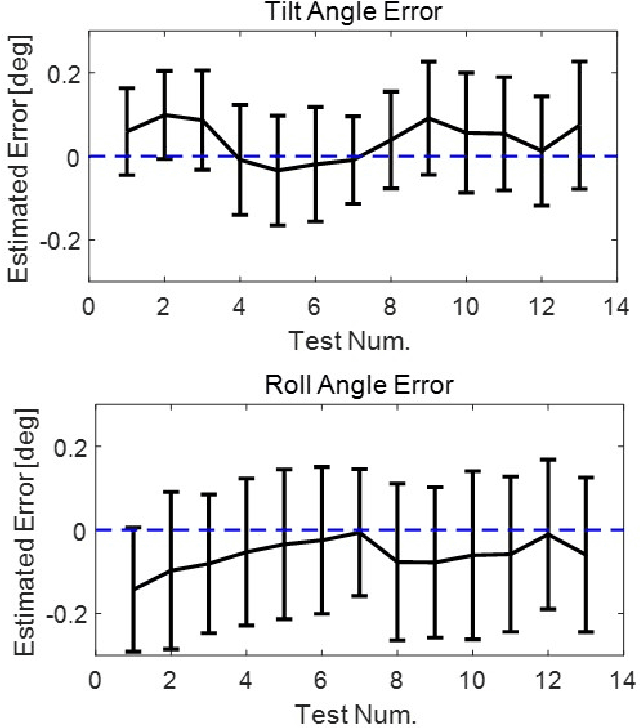
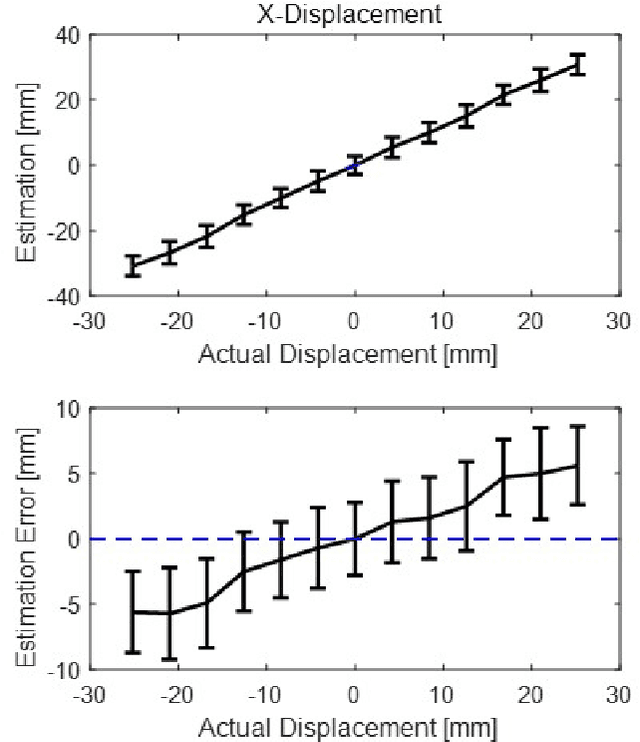
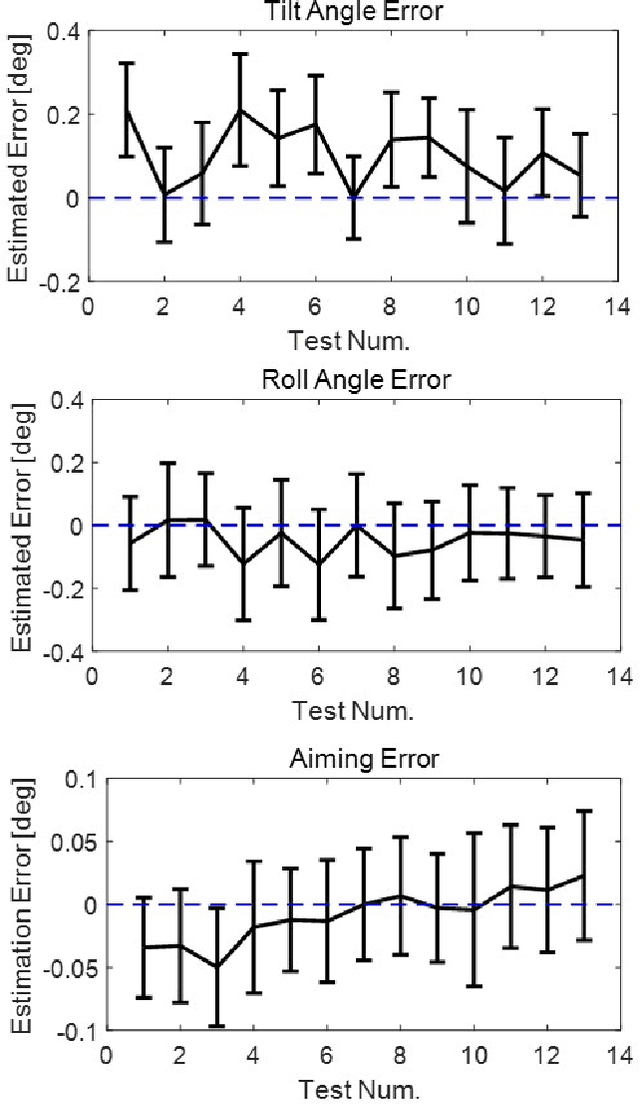
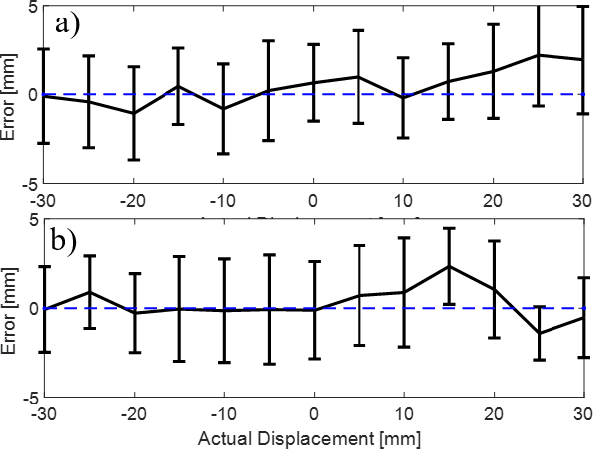
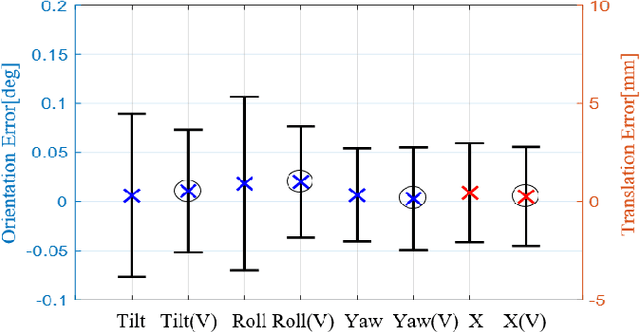
A misalignment of LiDAR as low as a few degrees could cause a significant error in obstacle detection and mapping that could cause safety and quality issues. In this paper, an accurate inspection system is proposed for estimating a LiDAR alignment error after sensor attachment on a mobility system such as a vehicle or robot. The proposed method uses only a single target board at the fixed position to estimate the three orientations (roll, tilt, and yaw) and the horizontal position of the LiDAR attachment with sub-degree and millimeter level accuracy. After the proposed preprocessing steps, the feature beam points that are the closest to each target corner are extracted and used to calculate the sensor attachment pose with respect to the target board frame using a nonlinear optimization method and with a low computational cost. The performance of the proposed method is evaluated using a test bench that can control the reference yaw and horizontal translation of LiDAR within ranges of 3 degrees and 30 millimeters, respectively. The experimental results for a low-resolution 16 channel LiDAR (Velodyne VLP-16) confirmed that misalignment could be estimated with accuracy within 0.2 degrees and 4 mm. The high accuracy and simplicity of the proposed system make it practical for large-scale industrial applications such as automobile or robot manufacturing process that inspects the sensor attachment for the safety quality control.
Automatic LiDAR Extrinsic Calibration System using Photodetector and Planar Board for Large-scale Applications
Aug 24, 2020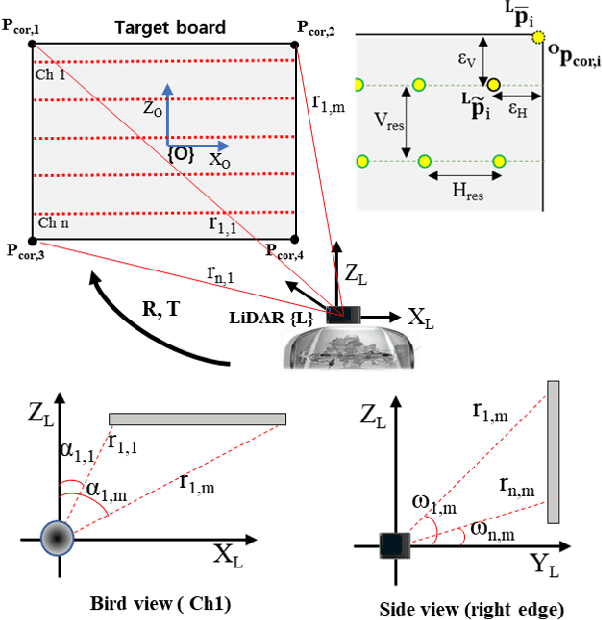
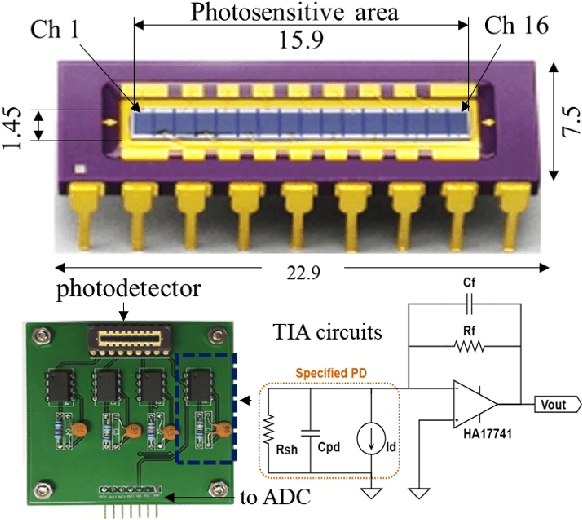
This paper presents a novel automatic calibration system to estimate the extrinsic parameters of LiDAR mounted on a mobile platform for sensor misalignment inspection in the large-scale production of highly automated vehicles. To obtain subdegree and subcentimeter accuracy levels of extrinsic calibration, this study proposed a new concept of a target board with embedded photodetector arrays, named the PD-target system, to find the precise position of the correspondence laser beams on the target surface. Furthermore, the proposed system requires only the simple design of the target board at the fixed pose in a close range to be readily applicable in the automobile manufacturing environment. The experimental evaluation of the proposed system on low-resolution LiDAR showed that the LiDAR offset pose can be estimated within 0.1 degree and 3 mm levels of precision. The high accuracy and simplicity of the proposed calibration system make it practical for large-scale applications for the reliability and safety of autonomous systems.