 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasuring Interventional Robustness in Reinforcement Learning
Sep 19, 2022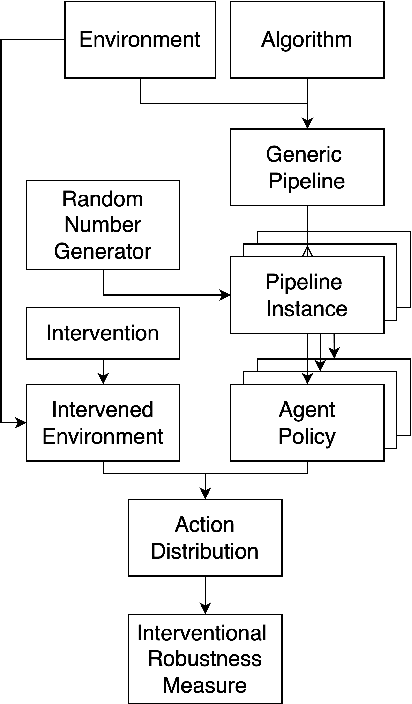
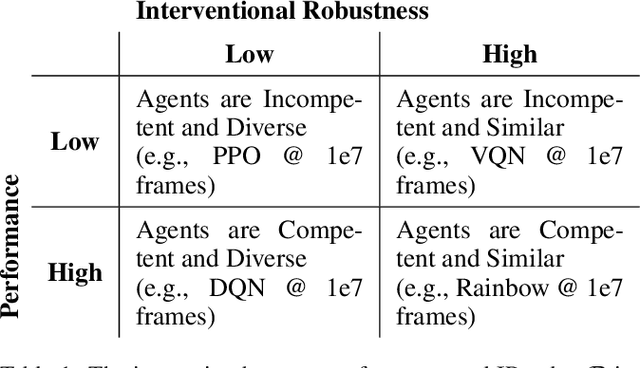
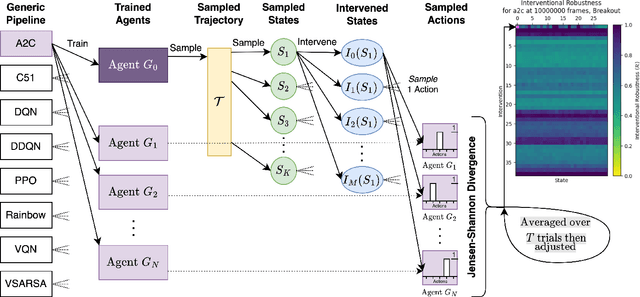
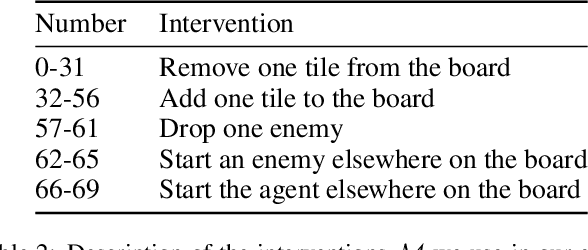
Recent work in reinforcement learning has focused on several characteristics of learned policies that go beyond maximizing reward. These properties include fairness, explainability, generalization, and robustness. In this paper, we define interventional robustness (IR), a measure of how much variability is introduced into learned policies by incidental aspects of the training procedure, such as the order of training data or the particular exploratory actions taken by agents. A training procedure has high IR when the agents it produces take very similar actions under intervention, despite variation in these incidental aspects of the training procedure. We develop an intuitive, quantitative measure of IR and calculate it for eight algorithms in three Atari environments across dozens of interventions and states. From these experiments, we find that IR varies with the amount of training and type of algorithm and that high performance does not imply high IR, as one might expect.
Deep Learning Regression of VLSI Plasma Etch Metrology
Sep 10, 2019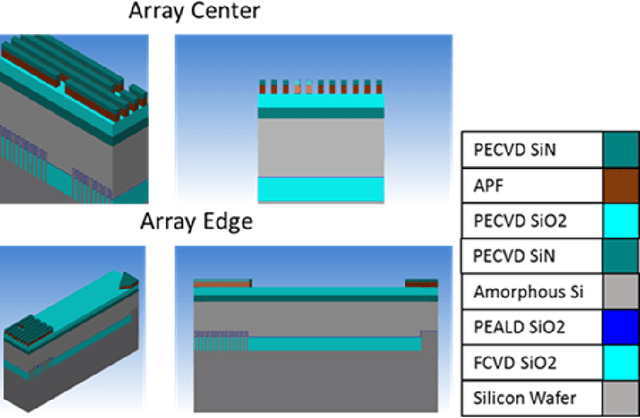
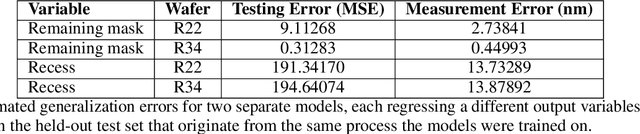

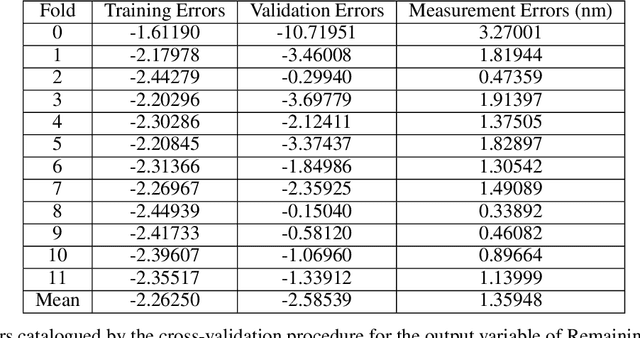
In computer chip manufacturing, the study of etch patterns on silicon wafers, or metrology, occurs on the nano-scale and is therefore subject to large variation from small, yet significant, perturbations in the manufacturing environment. An enormous amount of information can be gathered from a single etch process, a sequence of actions taken to produce an etched wafer from a blank piece of silicon. Each final wafer, however, is costly to take measurements from, which limits the number of examples available to train a predictive model. Part of the significance of this work is the success we saw from the models despite the limited number of examples. In order to accommodate the high dimensional process signatures, we isolated important sensor variables and applied domain-specific summarization on the data using multiple feature engineering techniques. We used a neural network architecture consisting of the summarized inputs, a single hidden layer of 4032 units, and an output layer of one unit. Two different models were learned, corresponding to the metrology measurements in the dataset, Recess and Remaining Mask. The outputs are related abstractly and do not form a two dimensional space, thus two separate models were learned. Our results approach the error tolerance of the microscopic imaging system. The model can make predictions for a class of etch recipes that include the correct number of etch steps and plasma reactors with the appropriate sensors, which are chambers containing an ionized gas that determine the manufacture environment. Notably, this method is not restricted to some maximum process length due to the summarization techniques used. This allows the method to be adapted to new processes that satisfy the aforementioned requirements. In order to automate semiconductor manufacturing, models like these will be needed throughout the process to evaluate production quality.