 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat Matters in Deep Learning for Time Series Forecasting?
Dec 27, 2025Deep learning models have grown increasingly popular in time series applications. However, the large quantity of newly proposed architectures, together with often contradictory empirical results, makes it difficult to assess which components contribute significantly to final performance. We aim to make sense of the current design space of deep learning architectures for time series forecasting by discussing the design dimensions and trade-offs that can explain, often unexpected, observed results. This paper discusses the necessity of grounding model design on principles for forecasting groups of time series and how such principles can be applied to current models. In particular, we assess how concepts such as locality and globality apply to recent forecasting architectures. We show that accounting for these aspects can be more relevant for achieving accurate results than adopting specific sequence modeling layers and that simple, well-designed forecasting architectures can often match the state of the art. We discuss how overlooked implementation details in existing architectures (1) fundamentally change the class of the resulting forecasting method and (2) drastically affect the observed empirical results. Our results call for rethinking current faulty benchmarking practices and the need to focus on the foundational aspects of the forecasting problem when designing architectures. As a step in this direction, we propose an auxiliary forecasting model card, whose fields serve to characterize existing and new forecasting architectures based on key design choices.
Torch Geometric Pool: the Pytorch library for pooling in Graph Neural Networks
Dec 14, 2025


We introduce Torch Geometric Pool (tgp), a library for hierarchical pooling in Graph Neural Networks. Built upon Pytorch Geometric, Torch Geometric Pool (tgp) provides a wide variety of pooling operators, unified under a consistent API and a modular design. The library emphasizes usability and extensibility, and includes features like precomputed pooling, which significantly accelerate training for a class of operators. In this paper, we present tgp's structure and present an extensive benchmark. The latter showcases the library's features and systematically compares the performance of the implemented graph-pooling methods in different downstream tasks. The results, showing that the choice of the optimal pooling operator depends on tasks and data at hand, support the need for a library that enables fast prototyping.
Over-squashing in Spatiotemporal Graph Neural Networks
Jun 18, 2025Graph Neural Networks (GNNs) have achieved remarkable success across various domains. However, recent theoretical advances have identified fundamental limitations in their information propagation capabilities, such as over-squashing, where distant nodes fail to effectively exchange information. While extensively studied in static contexts, this issue remains unexplored in Spatiotemporal GNNs (STGNNs), which process sequences associated with graph nodes. Nonetheless, the temporal dimension amplifies this challenge by increasing the information that must be propagated. In this work, we formalize the spatiotemporal over-squashing problem and demonstrate its distinct characteristics compared to the static case. Our analysis reveals that counterintuitively, convolutional STGNNs favor information propagation from points temporally distant rather than close in time. Moreover, we prove that architectures that follow either time-and-space or time-then-space processing paradigms are equally affected by this phenomenon, providing theoretical justification for computationally efficient implementations. We validate our findings on synthetic and real-world datasets, providing deeper insights into their operational dynamics and principled guidance for more effective designs.
PeakWeather: MeteoSwiss Weather Station Measurements for Spatiotemporal Deep Learning
Jun 16, 2025Accurate weather forecasts are essential for supporting a wide range of activities and decision-making processes, as well as mitigating the impacts of adverse weather events. While traditional numerical weather prediction (NWP) remains the cornerstone of operational forecasting, machine learning is emerging as a powerful alternative for fast, flexible, and scalable predictions. We introduce PeakWeather, a high-quality dataset of surface weather observations collected every 10 minutes over more than 8 years from the ground stations of the Federal Office of Meteorology and Climatology MeteoSwiss's measurement network. The dataset includes a diverse set of meteorological variables from 302 station locations distributed across Switzerland's complex topography and is complemented with topographical indices derived from digital height models for context. Ensemble forecasts from the currently operational high-resolution NWP model are provided as a baseline forecast against which to evaluate new approaches. The dataset's richness supports a broad spectrum of spatiotemporal tasks, including time series forecasting at various scales, graph structure learning, imputation, and virtual sensing. As such, PeakWeather serves as a real-world benchmark to advance both foundational machine learning research, meteorology, and sensor-based applications.
Graph-based Forecasting with Missing Data through Spatiotemporal Downsampling
Feb 16, 2024
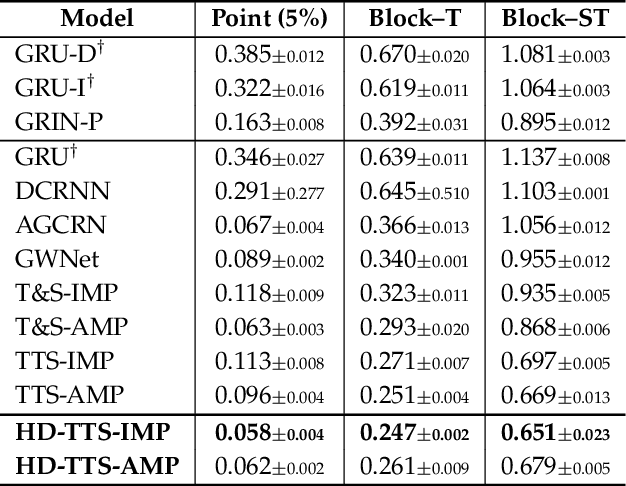


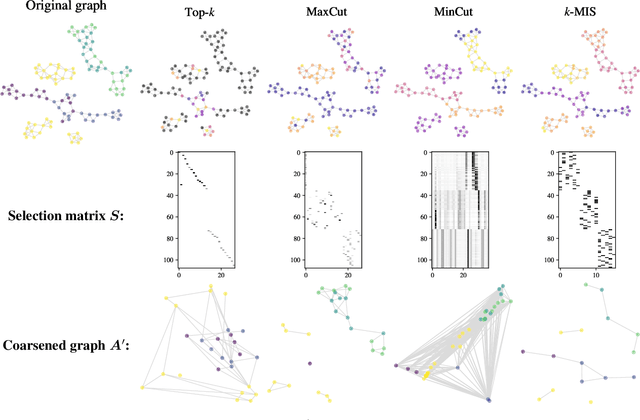
Given a set of synchronous time series, each associated with a sensor-point in space and characterized by inter-series relationships, the problem of spatiotemporal forecasting consists of predicting future observations for each point. Spatiotemporal graph neural networks achieve striking results by representing the relationships across time series as a graph. Nonetheless, most existing methods rely on the often unrealistic assumption that inputs are always available and fail to capture hidden spatiotemporal dynamics when part of the data is missing. In this work, we tackle this problem through hierarchical spatiotemporal downsampling. The input time series are progressively coarsened over time and space, obtaining a pool of representations that capture heterogeneous temporal and spatial dynamics. Conditioned on observations and missing data patterns, such representations are combined by an interpretable attention mechanism to generate the forecasts. Our approach outperforms state-of-the-art methods on synthetic and real-world benchmarks under different missing data distributions, particularly in the presence of contiguous blocks of missing values.
Graph Deep Learning for Time Series Forecasting
Oct 24, 2023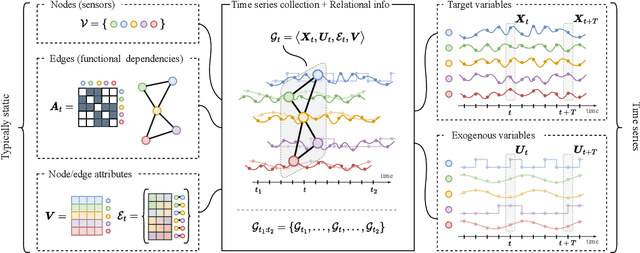

Graph-based deep learning methods have become popular tools to process collections of correlated time series. Differently from traditional multivariate forecasting methods, neural graph-based predictors take advantage of pairwise relationships by conditioning forecasts on a (possibly dynamic) graph spanning the time series collection. The conditioning can take the form of an architectural inductive bias on the neural forecasting architecture, resulting in a family of deep learning models called spatiotemporal graph neural networks. Such relational inductive biases enable the training of global forecasting models on large time-series collections, while at the same time localizing predictions w.r.t. each element in the set (i.e., graph nodes) by accounting for local correlations among them (i.e., graph edges). Indeed, recent theoretical and practical advances in graph neural networks and deep learning for time series forecasting make the adoption of such processing frameworks appealing and timely. However, most of the studies in the literature focus on proposing variations of existing neural architectures by taking advantage of modern deep learning practices, while foundational and methodological aspects have not been subject to systematic investigation. To fill the gap, this paper aims to introduce a comprehensive methodological framework that formalizes the forecasting problem and provides design principles for graph-based predictive models and methods to assess their performance. At the same time, together with an overview of the field, we provide design guidelines, recommendations, and best practices, as well as an in-depth discussion of open challenges and future research directions.
Taming Local Effects in Graph-based Spatiotemporal Forecasting
Feb 08, 2023



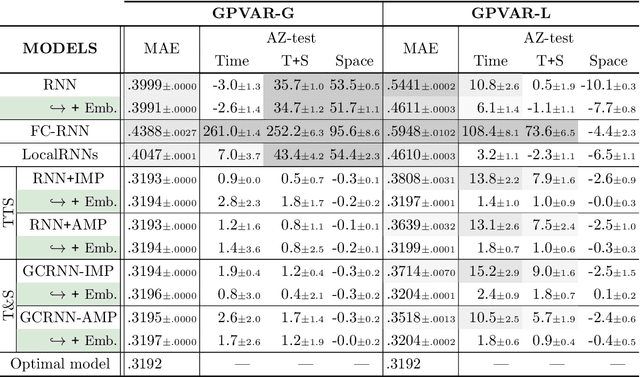
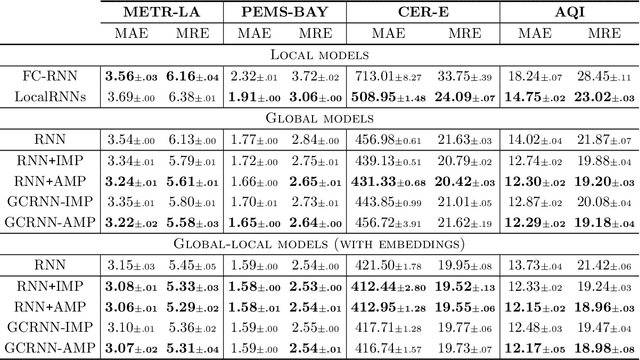
Spatiotemporal graph neural networks have shown to be effective in time series forecasting applications, achieving better performance than standard univariate predictors in several settings. These architectures take advantage of a graph structure and relational inductive biases to learn a single (global) inductive model to predict any number of the input time series, each associated with a graph node. Despite the gain achieved in computational and data efficiency w.r.t. fitting a set of local models, relying on a single global model can be a limitation whenever some of the time series are generated by a different spatiotemporal stochastic process. The main objective of this paper is to understand the interplay between globality and locality in graph-based spatiotemporal forecasting, while contextually proposing a methodological framework to rationalize the practice of including trainable node embeddings in such architectures. We ascribe to trainable node embeddings the role of amortizing the learning of specialized components. Moreover, embeddings allow for 1) effectively combining the advantages of shared message-passing layers with node-specific parameters and 2) efficiently transferring the learned model to new node sets. Supported by strong empirical evidence, we provide insights and guidelines for specializing graph-based models to the dynamics of each time series and show how this aspect plays a crucial role in obtaining accurate predictions.
Scalable Spatiotemporal Graph Neural Networks
Sep 14, 2022



Neural forecasting of spatiotemporal time series drives both research and industrial innovation in several relevant application domains. Graph neural networks (GNNs) are often the core component of the forecasting architecture. However, in most spatiotemporal GNNs, the computational complexity scales up to a quadratic factor with the length of the sequence times the number of links in the graph, hence hindering the application of these models to large graphs and long temporal sequences. While methods to improve scalability have been proposed in the context of static graphs, few research efforts have been devoted to the spatiotemporal case. To fill this gap, we propose a scalable architecture that exploits an efficient encoding of both temporal and spatial dynamics. In particular, we use a randomized recurrent neural network to embed the history of the input time series into high-dimensional state representations encompassing multi-scale temporal dynamics. Such representations are then propagated along the spatial dimension using different powers of the graph adjacency matrix to generate node embeddings characterized by a rich pool of spatiotemporal features. The resulting node embeddings can be efficiently pre-computed in an unsupervised manner, before being fed to a feed-forward decoder that learns to map the multi-scale spatiotemporal representations to predictions. The training procedure can then be parallelized node-wise by sampling the node embeddings without breaking any dependency, thus enabling scalability to large networks. Empirical results on relevant datasets show that our approach achieves results competitive with the state of the art, while dramatically reducing the computational burden.
Learning to Reconstruct Missing Data from Spatiotemporal Graphs with Sparse Observations
May 26, 2022



Modeling multivariate time series as temporal signals over a (possibly dynamic) graph is an effective representational framework that allows for developing models for time series analysis. In fact, discrete sequences of graphs can be processed by autoregressive graph neural networks to recursively learn representations at each discrete point in time and space. Spatiotemporal graphs are often highly sparse, with time series characterized by multiple, concurrent, and even long sequences of missing data, e.g., due to the unreliable underlying sensor network. In this context, autoregressive models can be brittle and exhibit unstable learning dynamics. The objective of this paper is, then, to tackle the problem of learning effective models to reconstruct, i.e., impute, missing data points by conditioning the reconstruction only on the available observations. In particular, we propose a novel class of attention-based architectures that, given a set of highly sparse discrete observations, learn a representation for points in time and space by exploiting a spatiotemporal diffusion architecture aligned with the imputation task. Representations are trained end-to-end to reconstruct observations w.r.t. the corresponding sensor and its neighboring nodes. Compared to the state of the art, our model handles sparse data without propagating prediction errors or requiring a bidirectional model to encode forward and backward time dependencies. Empirical results on representative benchmarks show the effectiveness of the proposed method.
Multivariate Time Series Imputation by Graph Neural Networks
Jul 31, 2021



Dealing with missing values and incomplete time series is a labor-intensive and time-consuming inevitable task when handling data coming from real-world applications. Effective spatio-temporal representations would allow imputation methods to reconstruct missing temporal data by exploiting information coming from sensors at different locations. However, standard methods fall short in capturing the nonlinear time and space dependencies existing within networks of interconnected sensors and do not take full advantage of the available - and often strong - relational information. Notably, most of state-of-the-art imputation methods based on deep learning do not explicitly model relational aspects and, in any case, do not exploit processing frameworks able to adequately represent structured spatio-temporal data. Conversely, graph neural networks have recently surged in popularity as both expressive and scalable tools for processing sequential data with relational inductive biases. In this work, we present the first assessment of graph neural networks in the context of multivariate time series imputation. In particular, we introduce a novel graph neural network architecture, named GRIL, which aims at reconstructing missing data in the different channels of a multivariate time series by learning spatial-temporal representations through message passing. Preliminary empirical results show that our model outperforms state-of-the-art methods in the imputation task on relevant benchmarks with mean absolute error improvements often higher than 20%.