 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistributed Model Predictive Covariance Steering
Dec 01, 2022

This paper proposes Distributed Model Predictive Covariance Steering (DMPCS), a novel method for safe multi-robot control under uncertainty. The scope of our approach is to blend covariance steering theory, distributed optimization and model predictive control (MPC) into a single methodology that is safe, scalable and decentralized. Initially, we pose a problem formulation that uses the Wasserstein distance to steer the state distributions of a multi-robot team to desired targets, and probabilistic constraints to ensure safety. We then transform this problem into a finite-dimensional optimization one by utilizing a disturbance feedback policy parametrization for covariance steering and a tractable approximation of the safety constraints. To solve the latter problem, we derive a decentralized consensus-based algorithm using the Alternating Direction Method of Multipliers (ADMM). This method is then extended to a receding horizon form, which yields the proposed DMPCS algorithm. Simulation experiments on large-scale problems with up to hundreds of robots successfully demonstrate the effectiveness and scalability of DMPCS. Its superior capability in achieving safety is also highlighted through a comparison against a standard stochastic MPC approach. A video with all simulation experiments is available in https://youtu.be/Hks-0BRozxA.
On the Convexity of Discrete Time Covariance Steering in Stochastic Linear Systems with Wasserstein Terminal Cost
Mar 25, 2021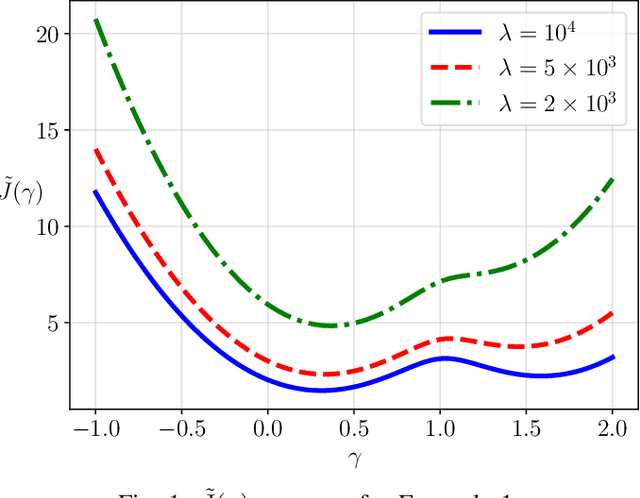
In this work, we analyze the properties of the solution to the covariance steering problem for discrete time Gaussian linear systems with a squared Wasserstein distance terminal cost. In our previous work, we have shown that by utilizing the state feedback control policy parametrization, this stochastic optimal control problem can be associated with a difference of convex functions program. Here, we revisit the same covariance control problem but this time we focus on the analysis of the problem. Specifically, we establish the existence of solutions to the optimization problem and derive the first and second order conditions for optimality. We provide analytic expressions for the gradient and the Hessian of the performance index by utilizing specialized tools from matrix calculus. Subsequently, we prove that the optimization problem always admits a global minimizer, and finally, we provide a sufficient condition for the performance index to be a strictly convex function (under the latter condition, the problem admits a unique global minimizer). In particular, we show that when the terminal state covariance is upper bounded, with respect to the L\"{o}wner partial order, by the covariance matrix of the desired terminal normal distribution, then our problem admits a unique global minimizing state feedback gain. The results of this paper set the stage for the development of specialized control design tools that exploit the structure of the solution to the covariance steering problem with a squared Wasserstein distance terminal cost.