 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBroadcast Guidance of Agents in Deviated Linear Cyclic Pursuit
Nov 01, 2020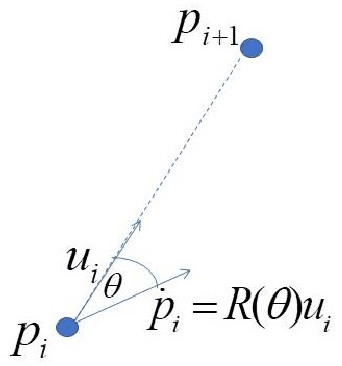
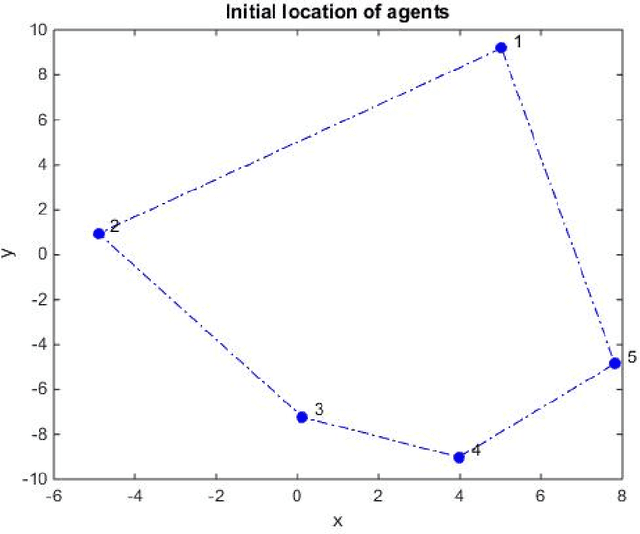
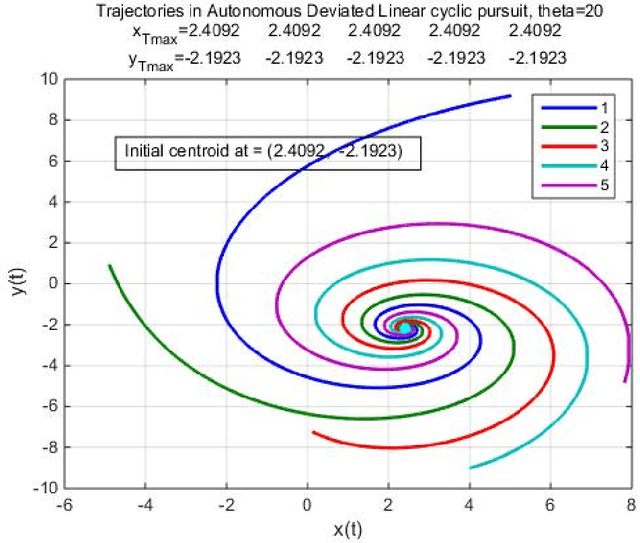

In this report we show the emergent behavior of a group of agents, ordered from 1 to n, performing deviated, linear, cyclic pursuit, in the presence of a broadcast guidance control. Each agent senses the relative position of its target, i.e. agent i senses the relative position of agent i+1. The broadcast control, a velocity signal, is detected by a random set of agents in the group. We assume the agents to be modeled as single integrators. We show that the emergent behavior of the group is determined by the deviation angle and by the set of agents detecting the guidance control.
Guidance of Agents in Cyclic Pursuit
Jul 02, 2020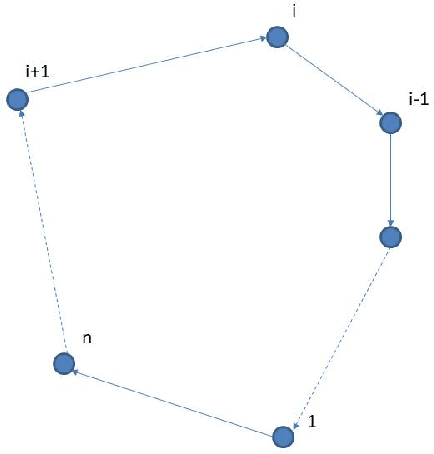
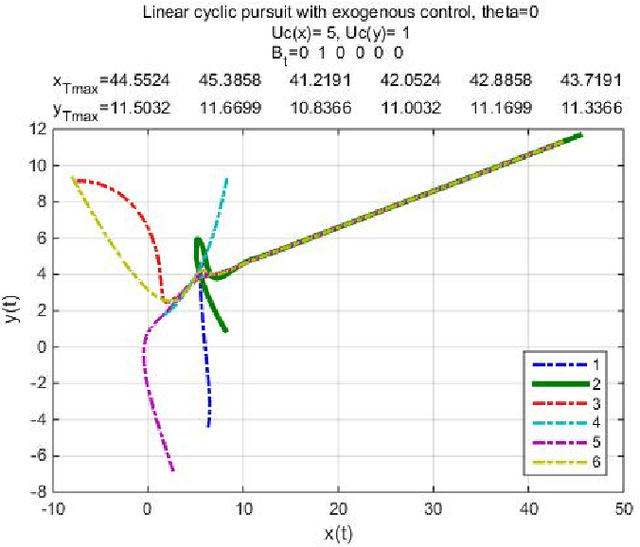
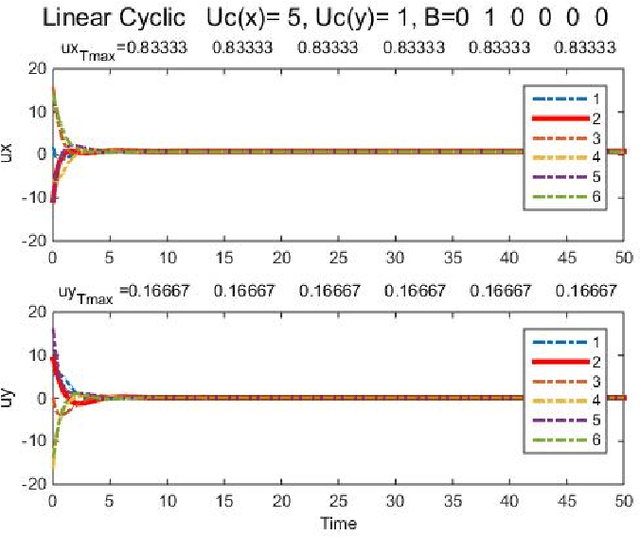
This report studies the emergent behavior of systems of agents performing cyclic pursuit controlled by an external broadcast signal detected by a random set of the agents. Two types of cyclic pursuit are analyzed: 1)linear cyclic pursuit, where each agent senses the relative position of its target or leading agent 2)non-linear cyclic pursuit, where the agents can sense only bearing to their leading agent and colliding agents merge and continue on the path of the pursued agent (a so-called "bugs" model). Cyclic pursuit is, in both cases, a gathering algorithm, which has been previously analyzed. The novelty of our work is the derivation of emergent behaviours, in both linear and non-linear cyclic pursuit, in the presence of an exogenous broadcast control detected by a random subset of agents. We show that the emergent behavior of the swarm depends on the type of cyclic pursuit. In the linear case, the agents asymptotically align in the desired direction and move with a common speed which is a proportional to the ratio of the number of agents detecting the broadcast control to the total number of agents in the swarm, for any magnitude of input (velocity) signal. In the non-linear case, the agents gather and move with a shared velocity, which equals the input velocity signal, independently of the number of agents detecting the broadcast signal.
Federated Learning for Ranking Browser History Suggestions
Nov 26, 2019
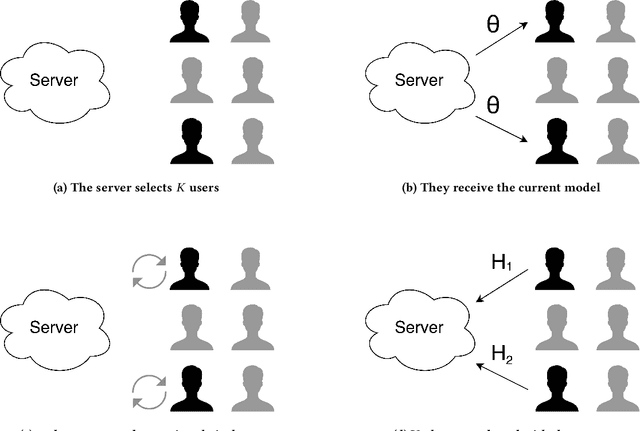
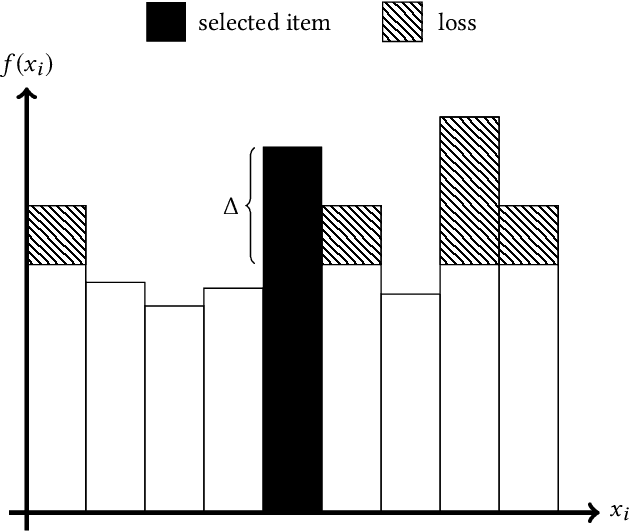
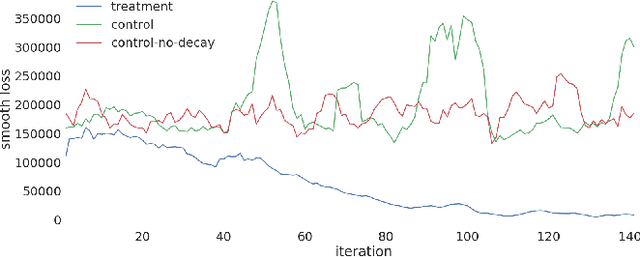
Federated Learning is a new subfield of machine learning that allows fitting models without collecting the training data itself. Instead of sharing data, users collaboratively train a model by only sending weight updates to a server. To improve the ranking of suggestions in the Firefox URL bar, we make use of Federated Learning to train a model on user interactions in a privacy-preserving way. This trained model replaces a handcrafted heuristic, and our results show that users now type over half a character less to find what they are looking for. To be able to deploy our system to real users without degrading their experience during training, we design the optimization process to be robust. To this end, we use a variant of Rprop for optimization, and implement additional safeguards. By using a numerical gradient approximation technique, our system is able to optimize anything in Firefox that is currently based on handcrafted heuristics. Our paper shows that Federated Learning can be used successfully to train models in privacy-respecting ways.
Stochastic Broadcast Control of Multi-Agent Swarms
Jul 17, 2016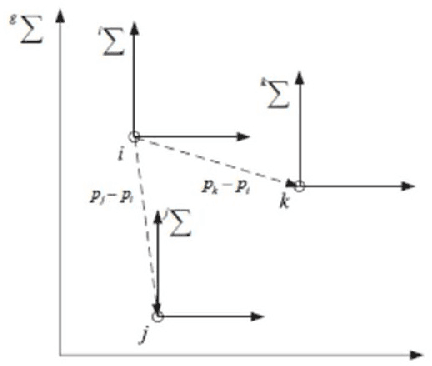
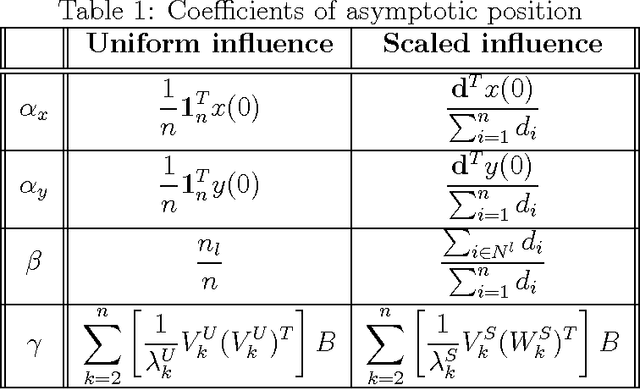
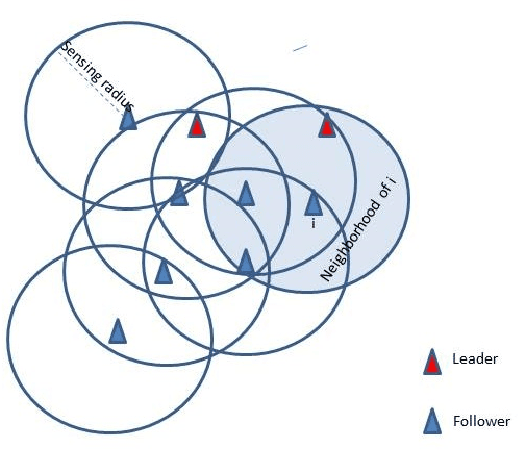
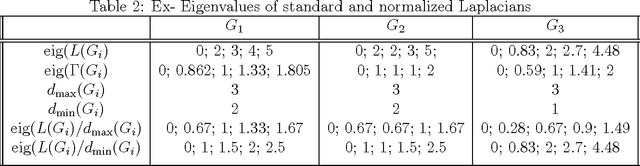
We present a model for controlling swarms of mobile agents via broadcast control, assumed to be detected by a random set of agents in the swarm. The agents that detect the control signal become ad-hoc leaders of the swarm. The agents are assumed to be velocity controlled, identical, anonymous, memory-less units with limited capabilities of sensing their neighborhood. Each agent is programmed to behave according to a linear local gathering process, based on the relative position of all its neighbors. The detected exogenous control, which is a desired velocity vector, is added by the leaders to the local gathering control. The graph induced by the agents adjacency is referred to as the visibility graph. We show that for piece-wise constant system parameters and a connected visibility graph, the swarm asymptotically aligns in each time-interval on a line in the direction of the exogenous control signal, and all the agents move with identical speed. These results hold for two models of pairwise influence in the gathering process, uniform and scaled. The impact of the influence model is mostly evident when the visibility graph is incomplete. These results are conditioned by the preservation of the connectedness of the visibility graph. In the second part of the report we analyze sufficient conditions for preserving the connectedness of the visibility graph. We show that if the visibility graph is complete then certain bounds on the control signal suffice to preserve the completeness of the graph. However, when the graph is incomplete, general conditions, independent of the leaders topology, could not be found.