 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgent as Cerebrum, Controller as Cerebellum: Implementing an Embodied LMM-based Agent on Drones
Nov 25, 2023
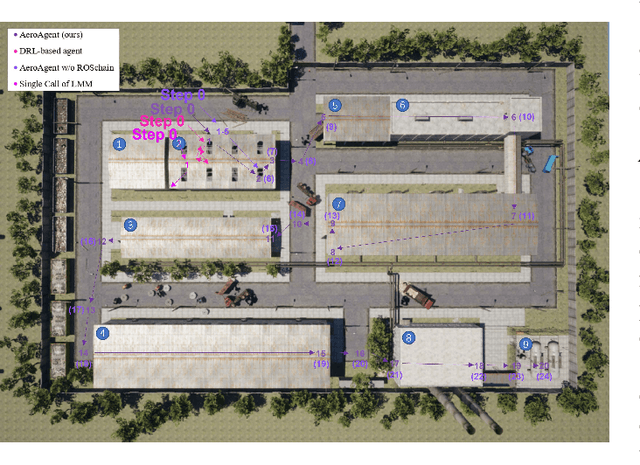


In this study, we present a novel paradigm for industrial robotic embodied agents, encapsulating an 'agent as cerebrum, controller as cerebellum' architecture. Our approach harnesses the power of Large Multimodal Models (LMMs) within an agent framework known as AeroAgent, tailored for drone technology in industrial settings. To facilitate seamless integration with robotic systems, we introduce ROSchain, a bespoke linkage framework connecting LMM-based agents to the Robot Operating System (ROS). We report findings from extensive empirical research, including simulated experiments on the Airgen and real-world case study, particularly in individual search and rescue operations. The results demonstrate AeroAgent's superior performance in comparison to existing Deep Reinforcement Learning (DRL)-based agents, highlighting the advantages of the embodied LMM in complex, real-world scenarios.
AgentSims: An Open-Source Sandbox for Large Language Model Evaluation
Aug 08, 2023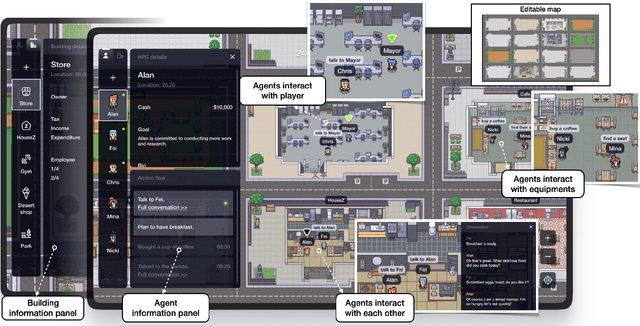

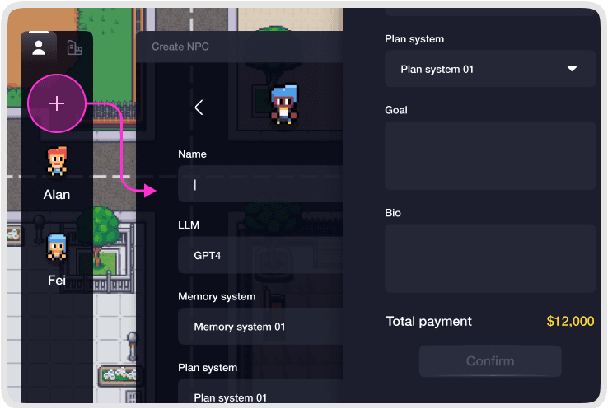
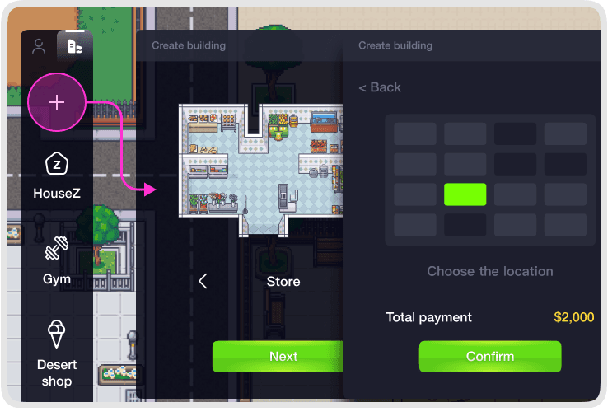
With ChatGPT-like large language models (LLM) prevailing in the community, how to evaluate the ability of LLMs is an open question. Existing evaluation methods suffer from following shortcomings: (1) constrained evaluation abilities, (2) vulnerable benchmarks, (3) unobjective metrics. We suggest that task-based evaluation, where LLM agents complete tasks in a simulated environment, is a one-for-all solution to solve above problems. We present AgentSims, an easy-to-use infrastructure for researchers from all disciplines to test the specific capacities they are interested in. Researchers can build their evaluation tasks by adding agents and buildings on an interactive GUI or deploy and test new support mechanisms, i.e. memory, planning and tool-use systems, by a few lines of codes. Our demo is available at https://agentsims.com .