 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Robust and Expressive Whole-body Human Pose and Shape Estimation
Dec 14, 2023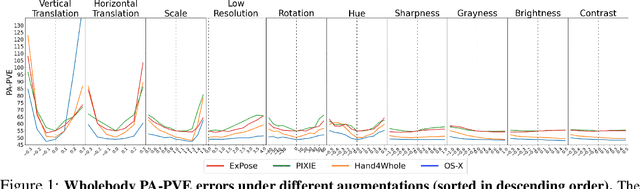
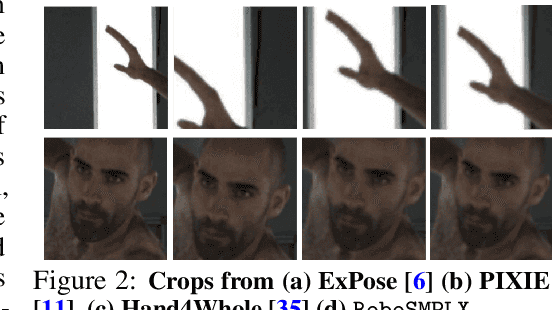
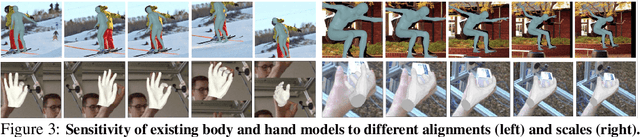
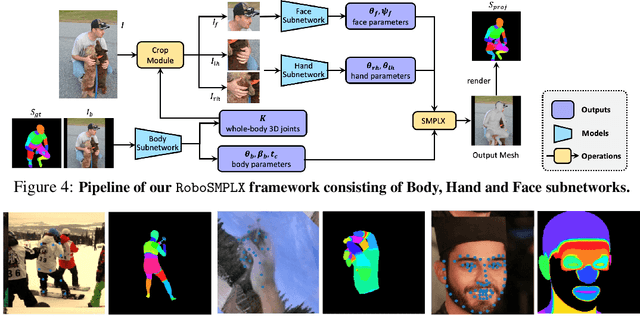
Whole-body pose and shape estimation aims to jointly predict different behaviors (e.g., pose, hand gesture, facial expression) of the entire human body from a monocular image. Existing methods often exhibit degraded performance under the complexity of in-the-wild scenarios. We argue that the accuracy and reliability of these models are significantly affected by the quality of the predicted \textit{bounding box}, e.g., the scale and alignment of body parts. The natural discrepancy between the ideal bounding box annotations and model detection results is particularly detrimental to the performance of whole-body pose and shape estimation. In this paper, we propose a novel framework to enhance the robustness of whole-body pose and shape estimation. Our framework incorporates three new modules to address the above challenges from three perspectives: \textbf{1) Localization Module} enhances the model's awareness of the subject's location and semantics within the image space. \textbf{2) Contrastive Feature Extraction Module} encourages the model to be invariant to robust augmentations by incorporating contrastive loss with dedicated positive samples. \textbf{3) Pixel Alignment Module} ensures the reprojected mesh from the predicted camera and body model parameters are accurate and pixel-aligned. We perform comprehensive experiments to demonstrate the effectiveness of our proposed framework on body, hands, face and whole-body benchmarks. Codebase is available at \url{https://github.com/robosmplx/robosmplx}.