 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAssumption Generation for the Verification of Learning-Enabled Autonomous Systems
May 27, 2023Providing safety guarantees for autonomous systems is difficult as these systems operate in complex environments that require the use of learning-enabled components, such as deep neural networks (DNNs) for visual perception. DNNs are hard to analyze due to their size (they can have thousands or millions of parameters), lack of formal specifications (DNNs are typically learnt from labeled data, in the absence of any formal requirements), and sensitivity to small changes in the environment. We present an assume-guarantee style compositional approach for the formal verification of system-level safety properties of such autonomous systems. Our insight is that we can analyze the system in the absence of the DNN perception components by automatically synthesizing assumptions on the DNN behaviour that guarantee the satisfaction of the required safety properties. The synthesized assumptions are the weakest in the sense that they characterize the output sequences of all the possible DNNs that, plugged into the autonomous system, guarantee the required safety properties. The assumptions can be leveraged as run-time monitors over a deployed DNN to guarantee the safety of the overall system; they can also be mined to extract local specifications for use during training and testing of DNNs. We illustrate our approach on a case study taken from the autonomous airplanes domain that uses a complex DNN for perception.
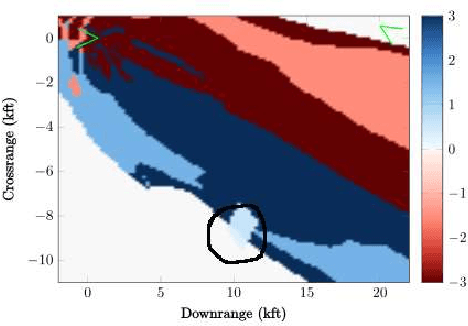
Closed-loop Analysis of Vision-based Autonomous Systems: A Case Study
Feb 06, 2023Deep neural networks (DNNs) are increasingly used in safety-critical autonomous systems as perception components processing high-dimensional image data. Formal analysis of these systems is particularly challenging due to the complexity of the perception DNNs, the sensors (cameras), and the environment conditions. We present a case study applying formal probabilistic analysis techniques to an experimental autonomous system that guides airplanes on taxiways using a perception DNN. We address the above challenges by replacing the camera and the network with a compact probabilistic abstraction built from the confusion matrices computed for the DNN on a representative image data set. We also show how to leverage local, DNN-specific analyses as run-time guards to increase the safety of the overall system. Our findings are applicable to other autonomous systems that use complex DNNs for perception.
Compositional Verification for Autonomous Systems with Deep Learning Components
Oct 18, 2018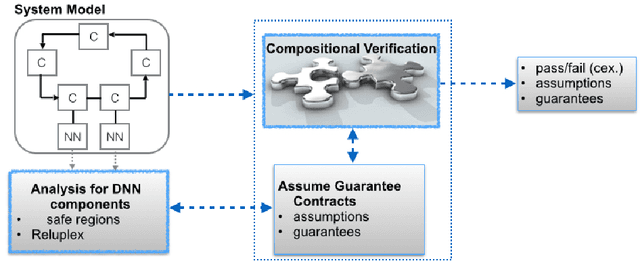
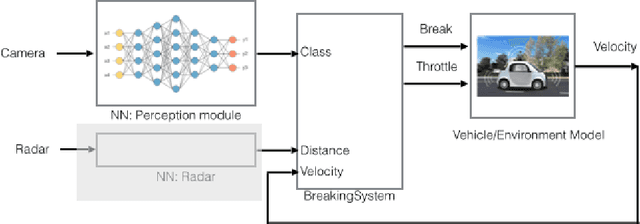
As autonomy becomes prevalent in many applications, ranging from recommendation systems to fully autonomous vehicles, there is an increased need to provide safety guarantees for such systems. The problem is difficult, as these are large, complex systems which operate in uncertain environments, requiring data-driven machine-learning components. However, learning techniques such as Deep Neural Networks, widely used today, are inherently unpredictable and lack the theoretical foundations to provide strong assurance guarantees. We present a compositional approach for the scalable, formal verification of autonomous systems that contain Deep Neural Network components. The approach uses assume-guarantee reasoning whereby {\em contracts}, encoding the input-output behavior of individual components, allow the designer to model and incorporate the behavior of the learning-enabled components working side-by-side with the other components. We illustrate the approach on an example taken from the autonomous vehicles domain.