 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Task and Motion Planning Framework Using Iteratively Deepened AND/OR Graph Networks
Mar 10, 2025In this paper, we present an approach for integrated task and motion planning based on an AND/OR graph network, which is used to represent task-level states and actions, and we leverage it to implement different classes of task and motion planning problems (TAMP). Several problems that fall under task and motion planning do not have a predetermined number of sub-tasks to achieve a goal. For example, while retrieving a target object from a cluttered workspace, in principle the number of object re-arrangements required to finally grasp it cannot be known ahead of time. To address this challenge, and in contrast to traditional planners, also those based on AND/OR graphs, we grow the AND/OR graph at run-time by progressively adding sub-graphs until grasping the target object becomes feasible, which yields a network of AND/OR graphs. The approach is extended to enable multi-robot task and motion planning, and (i) it allows us to perform task allocation while coordinating the activity of a given number of robots, and (ii) can handle multi-robot tasks involving an a priori unknown number of sub-tasks. The approach is evaluated and validated both in simulation and with a real dual-arm robot manipulator, that is, Baxter from Rethink Robotics. In particular, for the single-robot task and motion planning, we validated our approach in three different TAMP domains. Furthermore, we also use three different robots for simulation, namely, Baxter, Franka Emika Panda manipulators, and a PR2 robot. Experiments show that our approach can be readily scaled to scenarios with many objects and robots, and is capable of handling different classes of TAMP problems.
Task Allocation for Multi-Robot Task and Motion Planning: a case for Object Picking in Cluttered Workspaces
Oct 08, 2021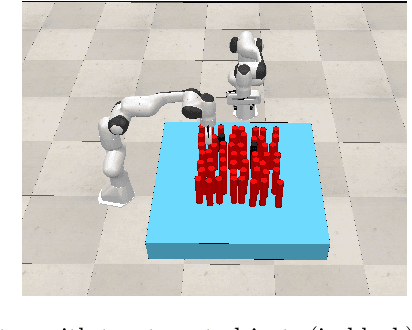
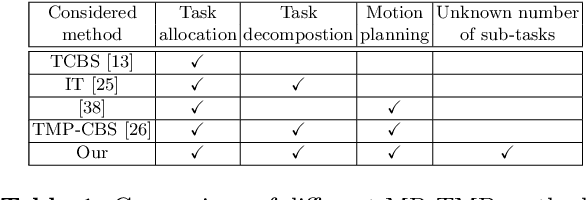
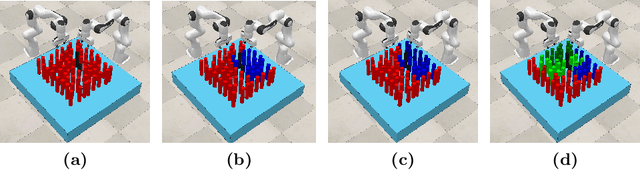
We present an AND/OR graph-based, integrated multi-robot task and motion planning approach which (i) performs task allocation coordinating the activity of a given number of robots, and (ii) is capable of handling tasks which involve an a priori unknown number of object re-arrangements, such as those involved in retrieving objects from cluttered workspaces. Such situations may arise, for example, in search and rescue scenarios, while locating/picking a cluttered object of interest. The corresponding problem falls under the category of planning in clutter. One of the challenges while planning in clutter is that the number of object re-arrangements required to pick the target object is not known beforehand, in general. Moreover, such tasks can be decomposed in a variety of ways, since different cluttering object re-arrangements are possible to reach the target object. In our approach, task allocation and decomposition is achieved by maximizing a combined utility function. The allocated tasks are performed by an integrated task and motion planner, which is robust to the requirement of an unknown number of re-arrangement tasks. We demonstrate our results with experiments in simulation on two Franka Emika manipulators.
A Task-Motion Planning Framework Using Iteratively Deepened AND/OR Graph Networks
Apr 04, 2021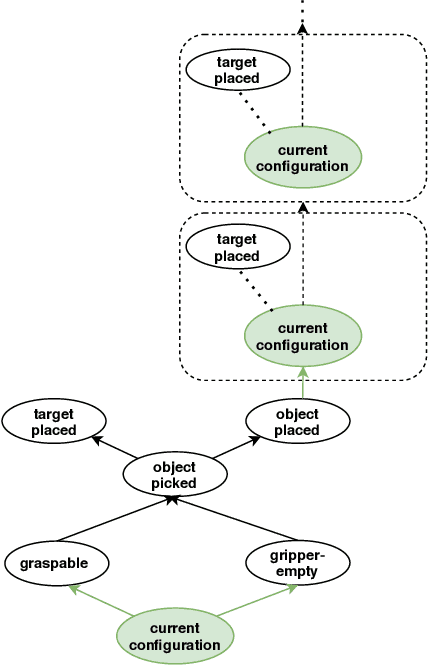
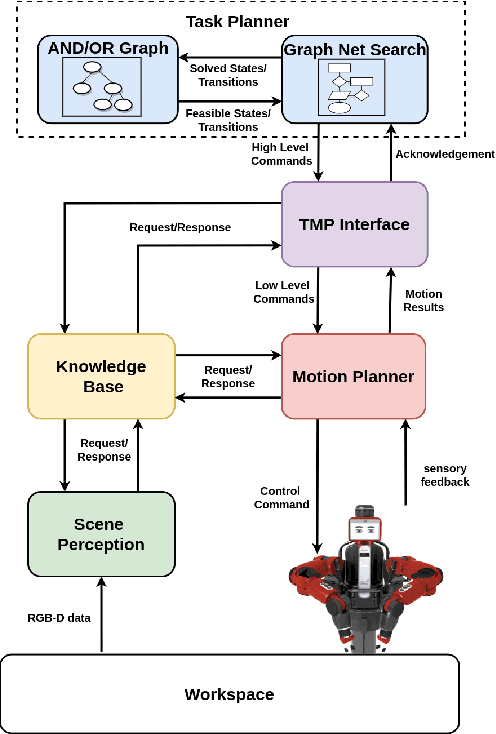
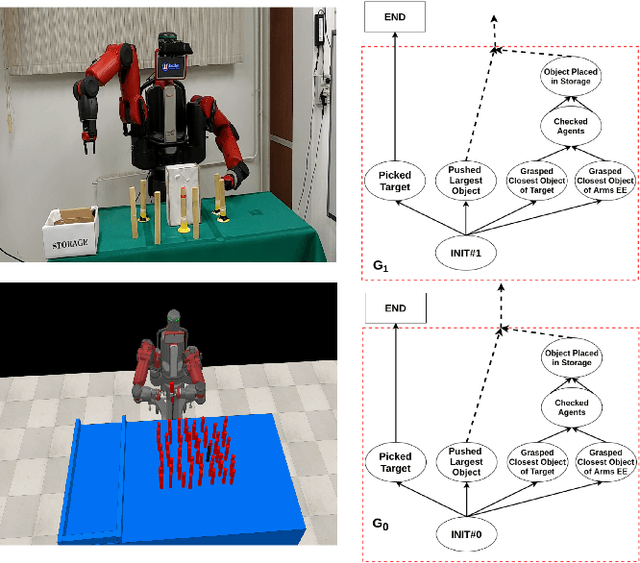
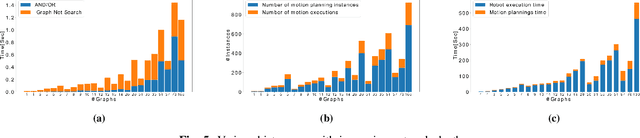
We present an approach for Task-Motion Planning (TMP) using Iterative Deepened AND/OR Graph Networks (TMP-IDAN) that uses an AND/OR graph network based novel abstraction for compactly representing the task-level states and actions. While retrieving a target object from clutter, the number of object re-arrangements required to grasp the target is not known ahead of time. To address this challenge, in contrast to traditional AND/OR graph-based planners, we grow the AND/OR graph online until the target grasp is feasible and thereby obtain a network of AND/OR graphs. The AND/OR graph network allows faster computations than traditional task planners. We validate our approach and evaluate its capabilities using a Baxter robot and a state-of-the-art robotics simulator in several challenging non-trivial cluttered table-top scenarios. The experiments show that our approach is readily scalable to increasing number of objects and different degrees of clutter.
A Task Allocation Approach for Human-Robot Collaboration in Product Defects Inspection Scenarios
Sep 14, 2020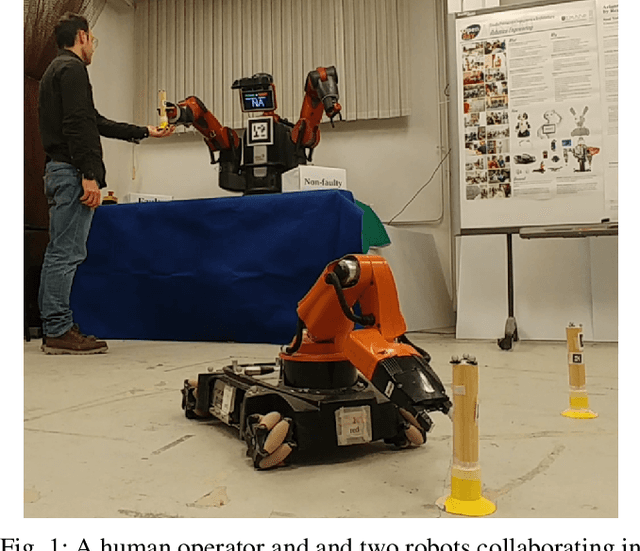
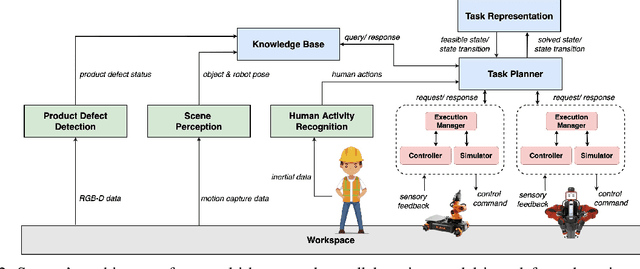
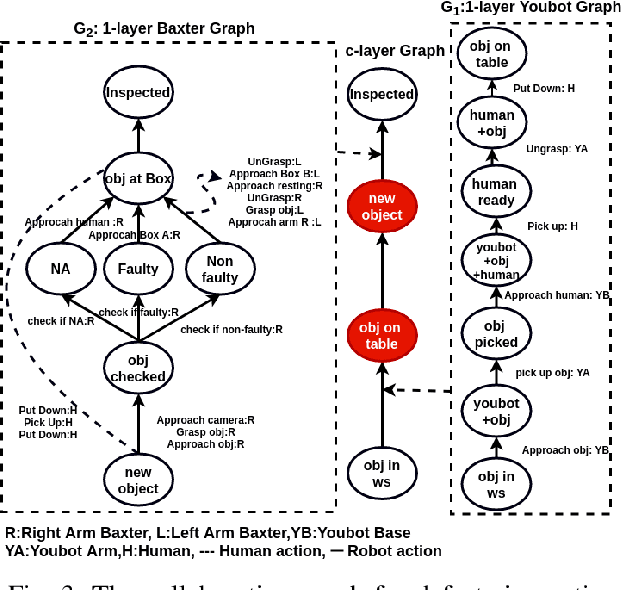

The presence and coexistence of human operators and collaborative robots in shop-floor environments raises the need for assigning tasks to either operators or robots, or both. Depending on task characteristics, operator capabilities and the involved robot functionalities, it is of the utmost importance to design strategies allowing for the concurrent and/or sequential allocation of tasks related to object manipulation and assembly. In this paper, we extend the \textsc{FlexHRC} framework presented in \cite{darvish2018flexible} to allow a human operator to interact with multiple, heterogeneous robots at the same time in order to jointly carry out a given task. The extended \textsc{FlexHRC} framework leverages a concurrent and sequential task representation framework to allocate tasks to either operators or robots as part of a dynamic collaboration process. In particular, we focus on a use case related to the inspection of product defects, which involves a human operator, a dual-arm Baxter manipulator from Rethink Robotics and a Kuka youBot mobile manipulator.