 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTask Allocation for Multi-Robot Task and Motion Planning: a case for Object Picking in Cluttered Workspaces
Paper and Code
Oct 08, 2021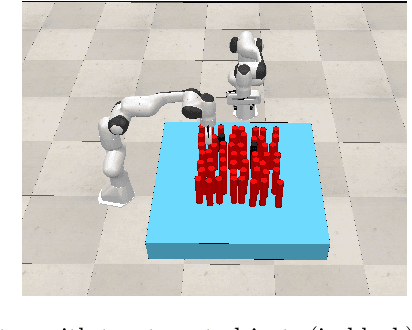
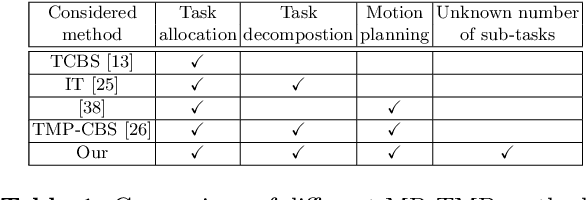
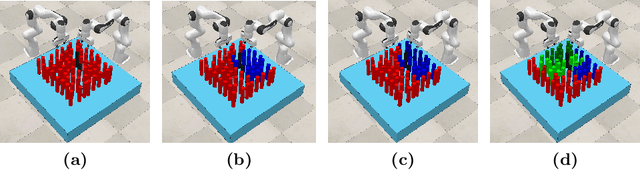
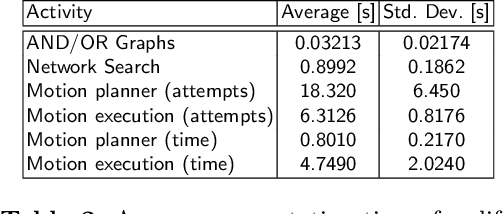
We present an AND/OR graph-based, integrated multi-robot task and motion planning approach which (i) performs task allocation coordinating the activity of a given number of robots, and (ii) is capable of handling tasks which involve an a priori unknown number of object re-arrangements, such as those involved in retrieving objects from cluttered workspaces. Such situations may arise, for example, in search and rescue scenarios, while locating/picking a cluttered object of interest. The corresponding problem falls under the category of planning in clutter. One of the challenges while planning in clutter is that the number of object re-arrangements required to pick the target object is not known beforehand, in general. Moreover, such tasks can be decomposed in a variety of ways, since different cluttering object re-arrangements are possible to reach the target object. In our approach, task allocation and decomposition is achieved by maximizing a combined utility function. The allocated tasks are performed by an integrated task and motion planner, which is robust to the requirement of an unknown number of re-arrangement tasks. We demonstrate our results with experiments in simulation on two Franka Emika manipulators.