 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUndergraduate Robotics Education with General Instructors using a Student-Centered Personalized Learning Framework
Jun 12, 2024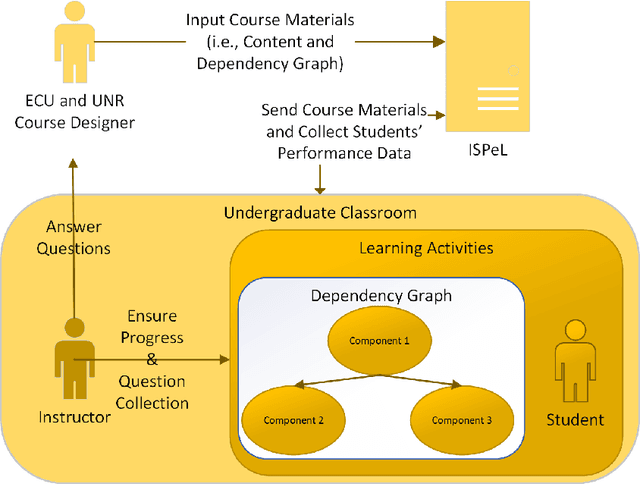
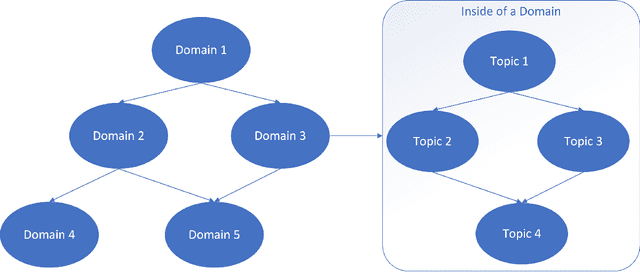
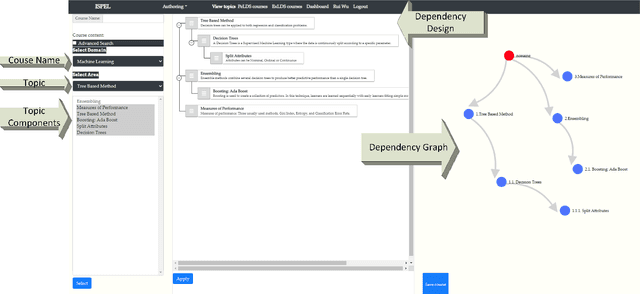
Recent advancements in robotics, including applications like self-driving cars, unmanned systems, and medical robots, have had a significant impact on the job market. On one hand, big robotics companies offer training programs based on the job requirements. However, these training programs may not be as beneficial as general robotics programs offered by universities or community colleges. On the other hand, community colleges and universities face challenges with required resources, especially qualified instructors, to offer students advanced robotics education. Furthermore, the diverse backgrounds of undergraduate students present additional challenges. Some students bring extensive industry experiences, while others are newcomers to the field. To address these challenges, we propose a student-centered personalized learning framework for robotics. This framework allows a general instructor to teach undergraduate-level robotics courses by breaking down course topics into smaller components with well-defined topic dependencies, structured as a graph. This modular approach enables students to choose their learning path, catering to their unique preferences and pace. Moreover, our framework's flexibility allows for easy customization of teaching materials to meet the specific needs of host institutions. In addition to teaching materials, a frequently-asked-questions document would be prepared for a general instructor. If students' robotics questions cannot be answered by the instructor, the answers to these questions may be included in this document. For questions not covered in this document, we can gather and address them through collaboration with the robotics community and course content creators. Our user study results demonstrate the promise of this method in delivering undergraduate-level robotics education tailored to individual learning outcomes and preferences.
A Schedule of Duties in the Cloud Space Using a Modified Salp Swarm Algorithm
Sep 18, 2023Cloud computing is a concept introduced in the information technology era, with the main components being the grid, distributed, and valuable computing. The cloud is being developed continuously and, naturally, comes up with many challenges, one of which is scheduling. A schedule or timeline is a mechanism used to optimize the time for performing a duty or set of duties. A scheduling process is accountable for choosing the best resources for performing a duty. The main goal of a scheduling algorithm is to improve the efficiency and quality of the service while at the same time ensuring the acceptability and effectiveness of the targets. The task scheduling problem is one of the most important NP-hard issues in the cloud domain and, so far, many techniques have been proposed as solutions, including using genetic algorithms (GAs), particle swarm optimization, (PSO), and ant colony optimization (ACO). To address this problem, in this paper, one of the collective intelligence algorithms, called the Salp Swarm Algorithm (SSA), has been expanded, improved, and applied. The performance of the proposed algorithm has been compared with that of GAs, PSO, continuous ACO, and the basic SSA. The results show that our algorithm has generally higher performance than the other algorithms. For example, compared to the basic SSA, the proposed method has an average reduction of approximately 21% in makespan.
WIP: Development of a Student-Centered Personalized Learning Framework to Advance Undergraduate Robotics Education
Sep 10, 2023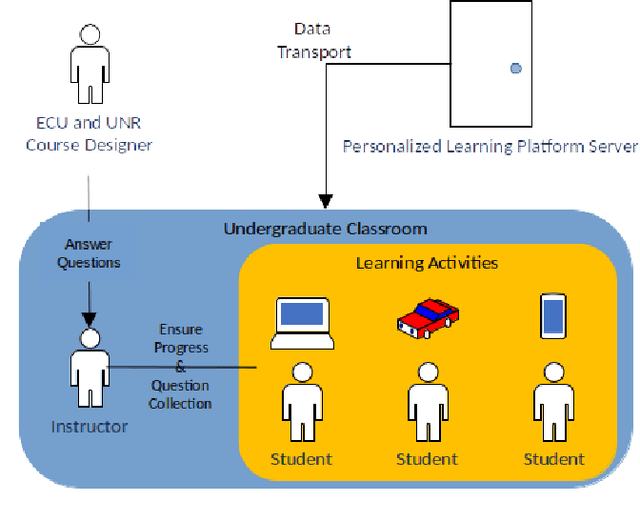
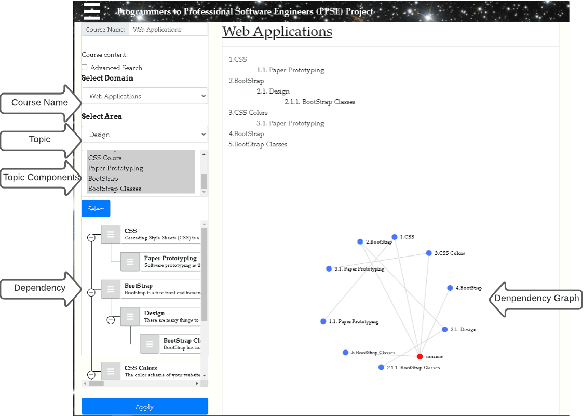
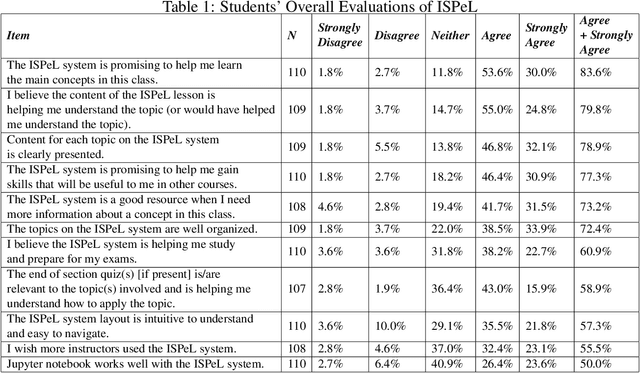
This paper presents a work-in-progress on a learn-ing system that will provide robotics students with a personalized learning environment. This addresses both the scarcity of skilled robotics instructors, particularly in community colleges and the expensive demand for training equipment. The study of robotics at the college level represents a wide range of interests, experiences, and aims. This project works to provide students the flexibility to adapt their learning to their own goals and prior experience. We are developing a system to enable robotics instruction through a web-based interface that is compatible with less expensive hardware. Therefore, the free distribution of teaching materials will empower educators. This project has the potential to increase the number of robotics courses offered at both two- and four-year schools and universities. The course materials are being designed with small units and a hierarchical dependency tree in mind; students will be able to customize their course of study based on the robotics skills they have already mastered. We present an evaluation of a five module mini-course in robotics. Students indicated that they had a positive experience with the online content. They also scored the experience highly on relatedness, mastery, and autonomy perspectives, demonstrating strong motivation potential for this approach.
* 5 pages, 2 figures, conference