 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWIP: A Unit Testing Framework for Self-Guided Personalized Online Robotics Learning
May 18, 2024Our ongoing development and deployment of an online robotics education platform highlighted a gap in providing an interactive, feedback-rich learning environment essential for mastering programming concepts in robotics, which they were not getting with the traditional code-simulate-turn in workflow. Since teaching resources are limited, students would benefit from feedback in real-time to find and fix their mistakes in the programming assignments. To address these concerns, this paper will focus on creating a system for unit testing while integrating it into the course workflow. We facilitate this real-time feedback by including unit testing in the design of programming assignments so students can understand and fix their errors on their own and without the prior help of instructors/TAs serving as a bottleneck. In line with the framework's personalized student-centered approach, this method makes it easier for students to revise, and debug their programming work, encouraging hands-on learning. The course workflow updated to include unit tests will strengthen the learning environment and make it more interactive so that students can learn how to program robots in a self-guided fashion.
Human Reactions to Incorrect Answers from Robots
Mar 21, 2024As robots grow more and more integrated into numerous industries, it is critical to comprehend how humans respond to their failures. This paper systematically studies how trust dynamics and system design are affected by human responses to robot failures. The three-stage survey used in the study provides a thorough understanding of human-robot interactions. While the second stage concentrates on interaction details, such as robot precision and error acknowledgment, the first stage collects demographic data and initial levels of trust. In the last phase, participants' perceptions are examined after the encounter, and trust dynamics, forgiveness, and propensity to suggest robotic technologies are evaluated. Results show that participants' trust in robotic technologies increased significantly when robots acknowledged their errors or limitations to participants and their willingness to suggest robots for activities in the future points to a favorable change in perception, emphasizing the role that direct engagement has in influencing trust dynamics. By providing useful advice for creating more sympathetic, responsive, and reliable robotic systems, the study advances the science of human-robot interaction and promotes a wider adoption of robotic technologies.
A Schedule of Duties in the Cloud Space Using a Modified Salp Swarm Algorithm
Sep 18, 2023Cloud computing is a concept introduced in the information technology era, with the main components being the grid, distributed, and valuable computing. The cloud is being developed continuously and, naturally, comes up with many challenges, one of which is scheduling. A schedule or timeline is a mechanism used to optimize the time for performing a duty or set of duties. A scheduling process is accountable for choosing the best resources for performing a duty. The main goal of a scheduling algorithm is to improve the efficiency and quality of the service while at the same time ensuring the acceptability and effectiveness of the targets. The task scheduling problem is one of the most important NP-hard issues in the cloud domain and, so far, many techniques have been proposed as solutions, including using genetic algorithms (GAs), particle swarm optimization, (PSO), and ant colony optimization (ACO). To address this problem, in this paper, one of the collective intelligence algorithms, called the Salp Swarm Algorithm (SSA), has been expanded, improved, and applied. The performance of the proposed algorithm has been compared with that of GAs, PSO, continuous ACO, and the basic SSA. The results show that our algorithm has generally higher performance than the other algorithms. For example, compared to the basic SSA, the proposed method has an average reduction of approximately 21% in makespan.
WIP: Development of a Student-Centered Personalized Learning Framework to Advance Undergraduate Robotics Education
Sep 10, 2023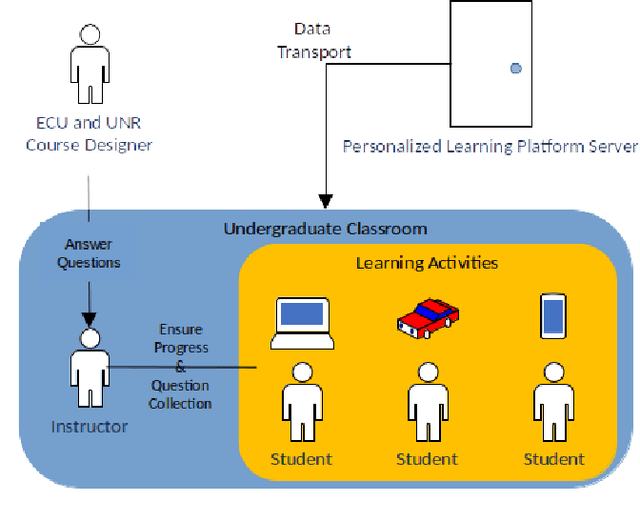
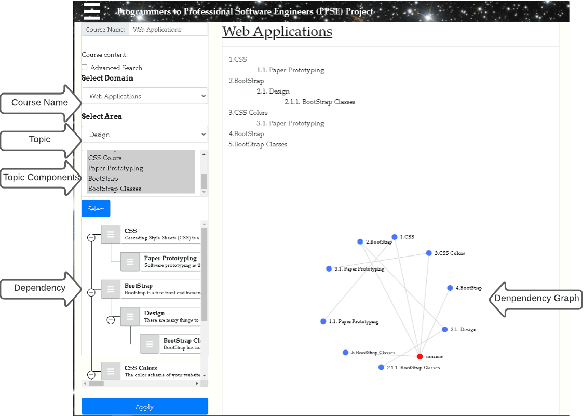
This paper presents a work-in-progress on a learn-ing system that will provide robotics students with a personalized learning environment. This addresses both the scarcity of skilled robotics instructors, particularly in community colleges and the expensive demand for training equipment. The study of robotics at the college level represents a wide range of interests, experiences, and aims. This project works to provide students the flexibility to adapt their learning to their own goals and prior experience. We are developing a system to enable robotics instruction through a web-based interface that is compatible with less expensive hardware. Therefore, the free distribution of teaching materials will empower educators. This project has the potential to increase the number of robotics courses offered at both two- and four-year schools and universities. The course materials are being designed with small units and a hierarchical dependency tree in mind; students will be able to customize their course of study based on the robotics skills they have already mastered. We present an evaluation of a five module mini-course in robotics. Students indicated that they had a positive experience with the online content. They also scored the experience highly on relatedness, mastery, and autonomy perspectives, demonstrating strong motivation potential for this approach.
* 5 pages, 2 figures, conference