 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOccCylindrical: Multi-Modal Fusion with Cylindrical Representation for 3D Semantic Occupancy Prediction
May 06, 2025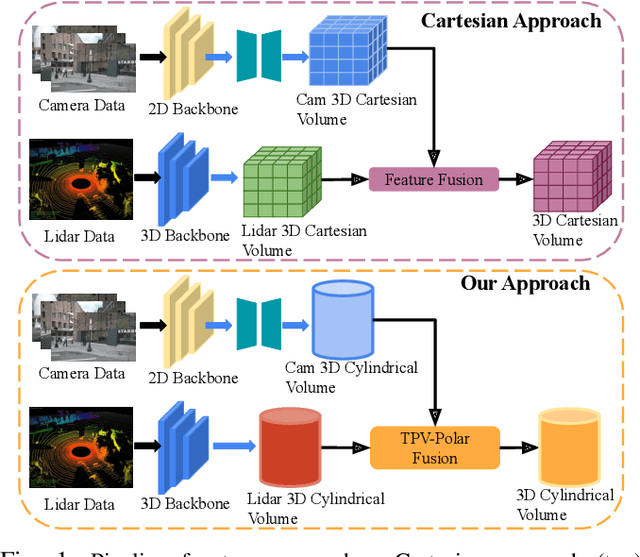
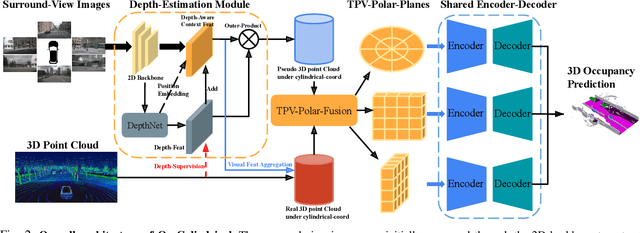
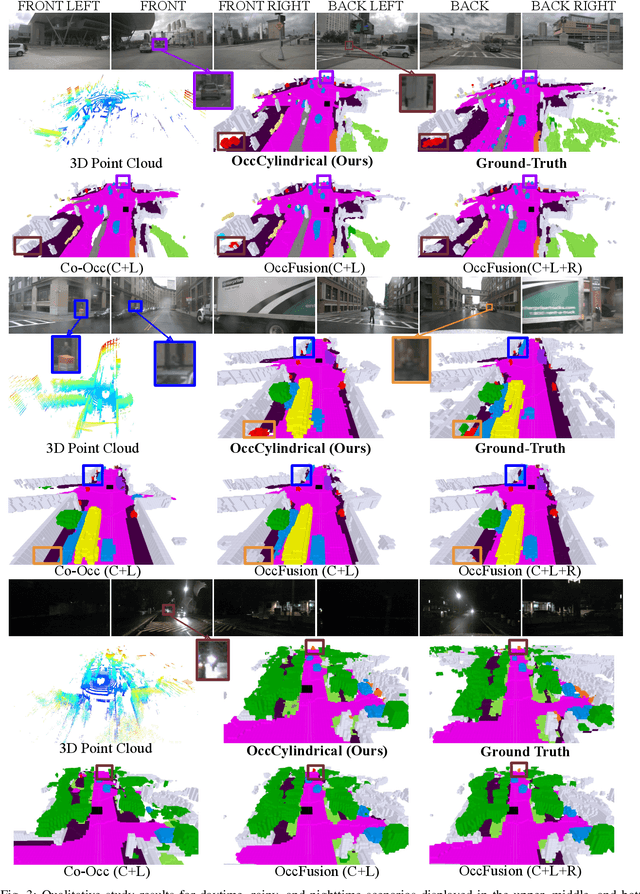
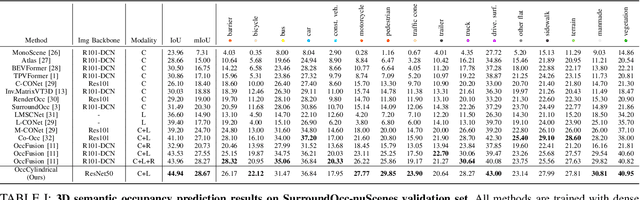
The safe operation of autonomous vehicles (AVs) is highly dependent on their understanding of the surroundings. For this, the task of 3D semantic occupancy prediction divides the space around the sensors into voxels, and labels each voxel with both occupancy and semantic information. Recent perception models have used multisensor fusion to perform this task. However, existing multisensor fusion-based approaches focus mainly on using sensor information in the Cartesian coordinate system. This ignores the distribution of the sensor readings, leading to a loss of fine-grained details and performance degradation. In this paper, we propose OccCylindrical that merges and refines the different modality features under cylindrical coordinates. Our method preserves more fine-grained geometry detail that leads to better performance. Extensive experiments conducted on the nuScenes dataset, including challenging rainy and nighttime scenarios, confirm our approach's effectiveness and state-of-the-art performance. The code will be available at: https://github.com/DanielMing123/OccCylindrical
M2S-RoAD: Multi-Modal Semantic Segmentation for Road Damage Using Camera and LiDAR Data
Apr 14, 2025Road damage can create safety and comfort challenges for both human drivers and autonomous vehicles (AVs). This damage is particularly prevalent in rural areas due to less frequent surveying and maintenance of roads. Automated detection of pavement deterioration can be used as an input to AVs and driver assistance systems to improve road safety. Current research in this field has predominantly focused on urban environments driven largely by public datasets, while rural areas have received significantly less attention. This paper introduces M2S-RoAD, a dataset for the semantic segmentation of different classes of road damage. M2S-RoAD was collected in various towns across New South Wales, Australia, and labelled for semantic segmentation to identify nine distinct types of road damage. This dataset will be released upon the acceptance of the paper.
SydneyScapes: Image Segmentation for Australian Environments
Apr 10, 2025



Autonomous Vehicles (AVs) are being partially deployed and tested across various global locations, including China, the USA, Germany, France, Japan, Korea, and the UK, but with limited demonstrations in Australia. The integration of machine learning (ML) into AV perception systems highlights the need for locally labelled datasets to develop and test algorithms in specific environments. To address this, we introduce SydneyScapes - a dataset tailored for computer vision tasks of image semantic, instance, and panoptic segmentation. This dataset, collected from Sydney and surrounding cities in New South Wales (NSW), Australia, consists of 756 images with high-quality pixel-level annotations. It is designed to assist AV industry and researchers by providing annotated data and tools for algorithm development, testing, and deployment in the Australian context. Additionally, we offer benchmarking results using state-of-the-art algorithms to establish reference points for future research and development. The dataset is publicly available at https://hdl.handle.net/2123/33051.