 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Scene-Level Signed Directional Distance Function with Ellipsoidal Priors and Neural Residuals
Mar 25, 2025



Dense geometric environment representations are critical for autonomous mobile robot navigation and exploration. Recent work shows that implicit continuous representations of occupancy, signed distance, or radiance learned using neural networks offer advantages in reconstruction fidelity, efficiency, and differentiability over explicit discrete representations based on meshes, point clouds, and voxels. In this work, we explore a directional formulation of signed distance, called signed directional distance function (SDDF). Unlike signed distance function (SDF) and similar to neural radiance fields (NeRF), SDDF has a position and viewing direction as input. Like SDF and unlike NeRF, SDDF directly provides distance to the observed surface along the direction, rather than integrating along the view ray, allowing efficient view synthesis. To learn and predict scene-level SDDF efficiently, we develop a differentiable hybrid representation that combines explicit ellipsoid priors and implicit neural residuals. This approach allows the model to effectively handle large distance discontinuities around obstacle boundaries while preserving the ability for dense high-fidelity prediction. We show that SDDF is competitive with the state-of-the-art neural implicit scene models in terms of reconstruction accuracy and rendering efficiency, while allowing differentiable view prediction for robot trajectory optimization.
Aerial Chasing of a Dynamic Target in Complex Environments
Dec 13, 2021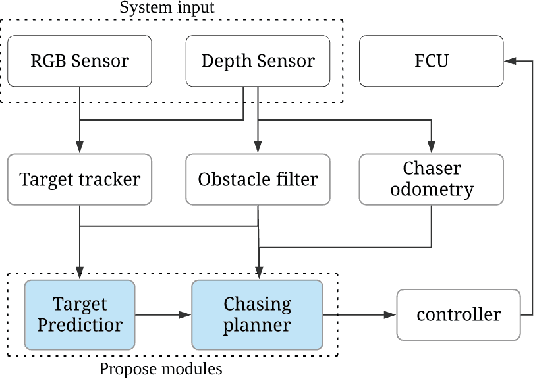
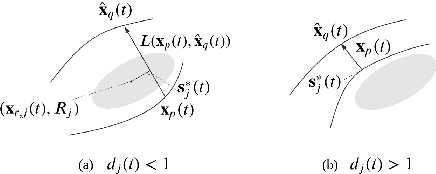
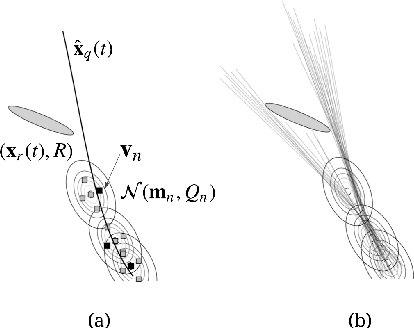

Rapidly generating an optimal chasing motion of a drone to follow a dynamic target among obstacles is challenging due to numerical issues rising from multiple conflicting objectives and non-convex constraints. This study proposes to resolve the difficulties with a fast and reliable pipeline that incorporates 1) a target movement forecaster and 2) a chasing planner. They are based on a sample-and-check approach that consists of the generation of high-quality candidate primitives and the feasibility tests with a light computation load. We forecast the movement of the target by selecting an optimal prediction among a set of candidates built from past observations. Based on the prediction, we construct a set of prospective chasing trajectories which reduce the high-order derivatives, while maintaining the desired relative distance from the predicted target movement. Then, the candidate trajectories are tested on safety of the chaser and visibility toward the target without loose approximation of the constraints. The proposed algorithm is thoroughly evaluated in challenging scenarios involving dynamic obstacles. Also, the overall process from the target recognition to the chasing motion planning is implemented fully onboard on a drone, demonstrating real-world applicability.
Pose Correction Algorithm for Relative Frames between Keyframes in SLAM
Sep 18, 2020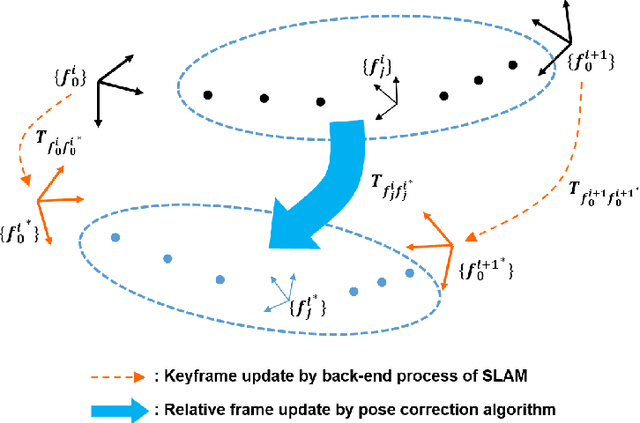


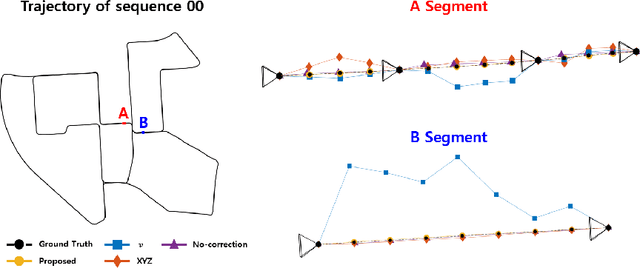
With the dominance of keyframe-based SLAM in the field of robotics, the relative frame poses between keyframes have typically been sacrificed for a faster algorithm to achieve online applications. However, those approaches can become insufficient for applications that may require refined poses of all frames, not just keyframes which are relatively sparse compared to all input frames. This paper proposes a novel algorithm to correct the relative frames between keyframes after the keyframes have been updated by a back-end optimization process. The correction model is derived using conservation of the measurement constraint between landmarks and the robot pose. The proposed algorithm is designed to be easily integrable to existing keyframe-based SLAM systems while exhibiting robust and accurate performance superior to existing interpolation methods. The algorithm also requires low computational resources and hence has a minimal burden on the whole SLAM pipeline. We provide the evaluation of the proposed pose correction algorithm in comparison to existing interpolation methods in various vector spaces, and our method has demonstrated excellent accuracy in both KITTI and EuRoC datasets.