 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAerial Chasing of a Dynamic Target in Complex Environments
Dec 13, 2021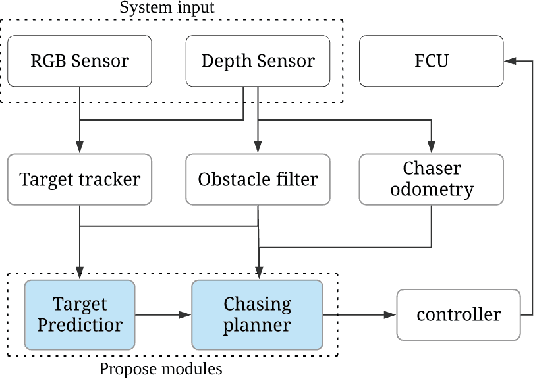

Rapidly generating an optimal chasing motion of a drone to follow a dynamic target among obstacles is challenging due to numerical issues rising from multiple conflicting objectives and non-convex constraints. This study proposes to resolve the difficulties with a fast and reliable pipeline that incorporates 1) a target movement forecaster and 2) a chasing planner. They are based on a sample-and-check approach that consists of the generation of high-quality candidate primitives and the feasibility tests with a light computation load. We forecast the movement of the target by selecting an optimal prediction among a set of candidates built from past observations. Based on the prediction, we construct a set of prospective chasing trajectories which reduce the high-order derivatives, while maintaining the desired relative distance from the predicted target movement. Then, the candidate trajectories are tested on safety of the chaser and visibility toward the target without loose approximation of the constraints. The proposed algorithm is thoroughly evaluated in challenging scenarios involving dynamic obstacles. Also, the overall process from the target recognition to the chasing motion planning is implemented fully onboard on a drone, demonstrating real-world applicability.
Detection-Aware Trajectory Generation for a Drone Cinematographer
Sep 03, 2020This work investigates an efficient trajectory generation for chasing a dynamic target, which incorporates the detectability objective. The proposed method actively guides the motion of a cinematographer drone so that the color of a target is well-distinguished against the colors of the background in the view of the drone. For the objective, we define a measure of color detectability given a chasing path. After computing a discrete path optimized for the metric, we generate a dynamically feasible trajectory. The whole pipeline can be updated on-the-fly to respond to the motion of the target. For the efficient discrete path generation, we construct a directed acyclic graph (DAG) for which a topological sorting can be determined analytically without the depth-first search. The smooth path is obtained in quadratic programming (QP) framework. We validate the enhanced performance of state-of-the-art object detection and tracking algorithms when the camera drone executes the trajectory obtained from the proposed method.
Online Trajectory Generation of a MAV for Chasing a Moving Target in 3D Dense Environments
Apr 06, 2019


This work deals with a moving target chasing mission of an aerial vehicle equipped with a vision sensor in a cluttered environment. In contrast to obstacle-free or sparse environments, the chaser should be able to handle collision and occlusion simultaneously with flight efficiency. In order to tackle these challenges with real-time replanning, we introduce a metric for target visibility and propose a cascaded chasing planner. By means of the graph-search methods, we first generate a sequence of chasing corridors and waypoints which ensure safety and optimize visibility. In the following phase, the corridors and waypoints are utilized as constraints and objective in quadratic programming from which we complete a dynamically feasible trajectory for chasing. The proposed algorithm is tested in multiple dense environments. The simulator AutoChaser with full code implementation and GUI can be found in https://github.com/icsl-Jeon/traj_gen_vis