 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal feedback for active robot-object interaction
Sep 10, 2018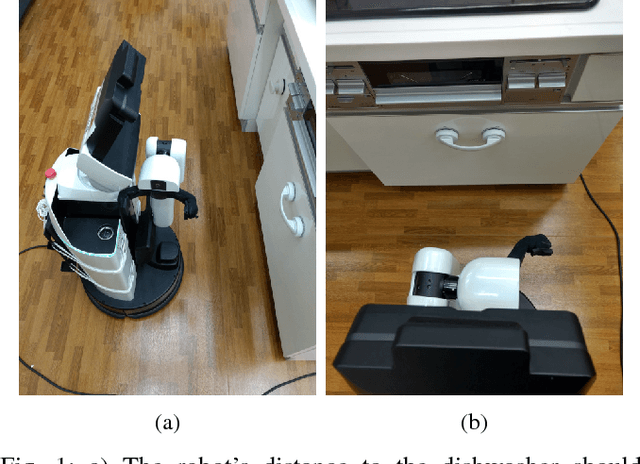
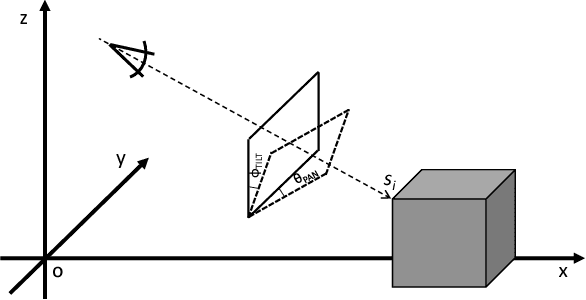
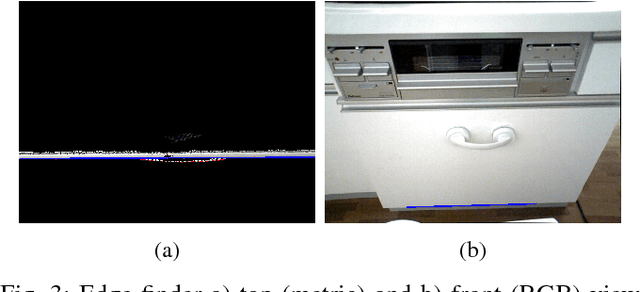
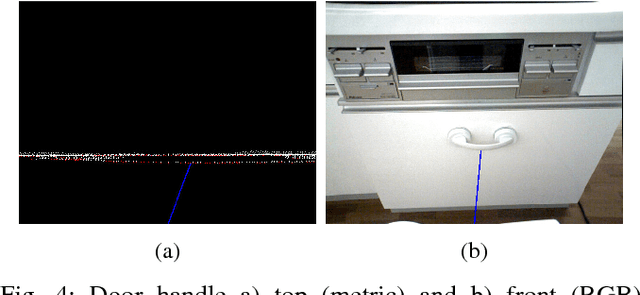
In this work, we present a multimodal system for active robot-object interaction using laser-based SLAM, RGBD images, and contact sensors. In the object manipulation task, the robot adjusts its initial pose with respect to obstacles and target objects through RGBD data so it can perform object grasping in different configuration spaces while avoiding collisions, and updates the information related to the last steps of the manipulation process using the contact sensors in its hand. We perform a series of experiment to evaluate the performance of the proposed system following the the RoboCup2018 international competition regulations. We compare our approach with a number of baselines, namely a no-feedback method and visual-only and tactile-only feedback methods, where our proposed visual-and-tactile feedback method performs best.
Causal Patterns: Extraction of multiple causal relationships by Mixture of Probabilistic Partial Canonical Correlation Analysis
Dec 12, 2017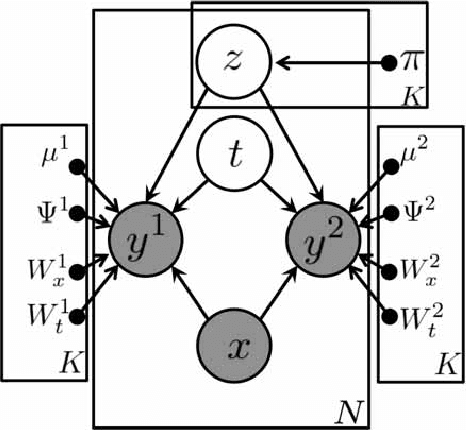
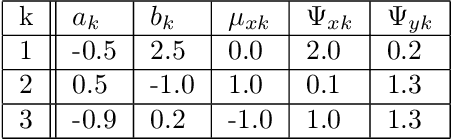
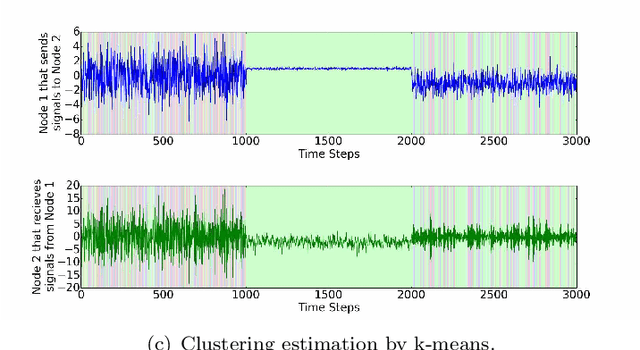
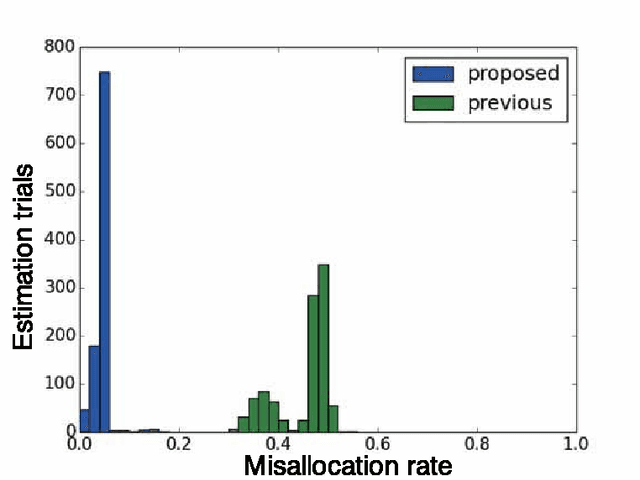
In this paper, we propose a mixture of probabilistic partial canonical correlation analysis (MPPCCA) that extracts the Causal Patterns from two multivariate time series. Causal patterns refer to the signal patterns within interactions of two elements having multiple types of mutually causal relationships, rather than a mixture of simultaneous correlations or the absence of presence of a causal relationship between the elements. In multivariate statistics, partial canonical correlation analysis (PCCA) evaluates the correlation between two multivariates after subtracting the effect of the third multivariate. PCCA can calculate the Granger Causal- ity Index (which tests whether a time-series can be predicted from an- other time-series), but is not applicable to data containing multiple partial canonical correlations. After introducing the MPPCCA, we propose an expectation-maxmization (EM) algorithm that estimates the parameters and latent variables of the MPPCCA. The MPPCCA is expected to ex- tract multiple partial canonical correlations from data series without any supervised signals to split the data as clusters. The method was then eval- uated in synthetic data experiments. In the synthetic dataset, our method estimated the multiple partial canonical correlations more accurately than the existing method. To determine the types of patterns detectable by the method, experiments were also conducted on real datasets. The method estimated the communication patterns In motion-capture data. The MP- PCCA is applicable to various type of signals such as brain signals, human communication and nonlinear complex multibody systems.
* DSAA2017 - The 4th IEEE International Conference on Data Science and Advanced Analytics