 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLAformer: Trajectory Prediction for Autonomous Driving with Lane-Aware Scene Constraints
Feb 27, 2023Trajectory prediction for autonomous driving must continuously reason the motion stochasticity of road agents and comply with scene constraints. Existing methods typically rely on one-stage trajectory prediction models, which condition future trajectories on observed trajectories combined with fused scene information. However, they often struggle with complex scene constraints, such as those encountered at intersections. To this end, we present a novel method, called LAformer. It uses a temporally dense lane-aware estimation module to select only the top highly potential lane segments in an HD map, which effectively and continuously aligns motion dynamics with scene information, reducing the representation requirements for the subsequent attention-based decoder by filtering out irrelevant lane segments. Additionally, unlike one-stage prediction models, LAformer utilizes predictions from the first stage as anchor trajectories and adds a second-stage motion refinement module to further explore temporal consistency across the complete time horizon. Extensive experiments on Argoverse 1 and nuScenes demonstrate that LAformer achieves excellent performance for multimodal trajectory prediction.
GATraj: A Graph- and Attention-based Multi-Agent Trajectory Prediction Model
Sep 16, 2022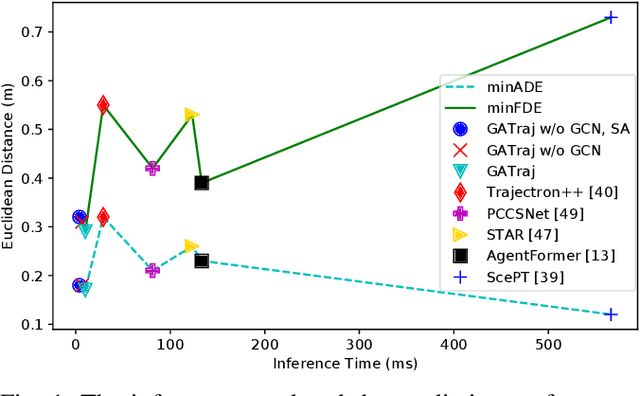

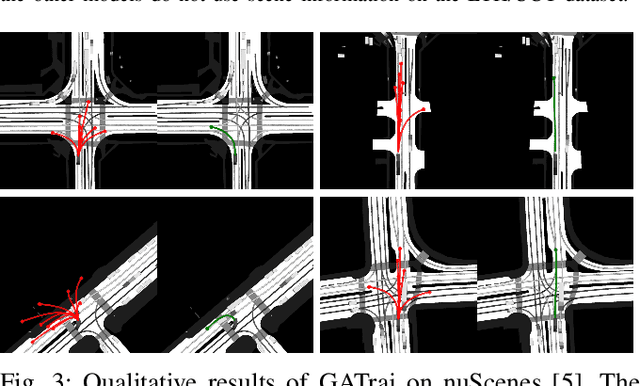
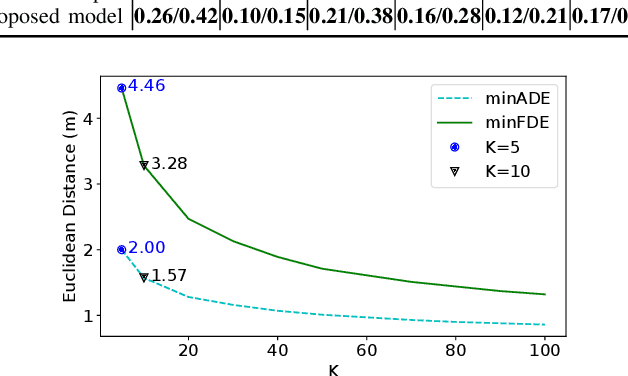
Trajectory prediction has been a long-standing problem in intelligent systems such as autonomous driving and robot navigation. Recent state-of-the-art models trained on large-scale benchmarks have been pushing the limit of performance rapidly, mainly focusing on improving prediction accuracy. However, those models put less emphasis on efficiency, which is critical for real-time applications. This paper proposes an attention-based graph model named GATraj with a much higher prediction speed. Spatial-temporal dynamics of agents, e.g., pedestrians or vehicles, are modeled by attention mechanisms. Interactions among agents are modeled by a graph convolutional network. We also implement a Laplacian mixture decoder to mitigate mode collapse and generate diverse multimodal predictions for each agent. Our model achieves performance on par with the state-of-the-art models at a much higher prediction speed tested on multiple open datasets.