 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMESSI: A Multi-Elevation Semantic Segmentation Image Dataset of an Urban Environment
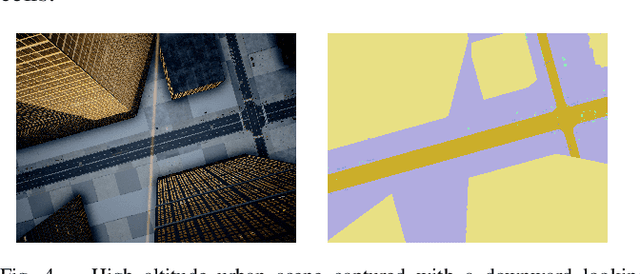
May 13, 2025This paper presents a Multi-Elevation Semantic Segmentation Image (MESSI) dataset comprising 2525 images taken by a drone flying over dense urban environments. MESSI is unique in two main features. First, it contains images from various altitudes, allowing us to investigate the effect of depth on semantic segmentation. Second, it includes images taken from several different urban regions (at different altitudes). This is important since the variety covers the visual richness captured by a drone's 3D flight, performing horizontal and vertical maneuvers. MESSI contains images annotated with location, orientation, and the camera's intrinsic parameters and can be used to train a deep neural network for semantic segmentation or other applications of interest (e.g., localization, navigation, and tracking). This paper describes the dataset and provides annotation details. It also explains how semantic segmentation was performed using several neural network models and shows several relevant statistics. MESSI will be published in the public domain to serve as an evaluation benchmark for semantic segmentation using images captured by a drone or similar vehicle flying over a dense urban environment.
Finding a Landing Site on an Urban Area: A Multi-Resolution Probabilistic Approach
Apr 26, 2022
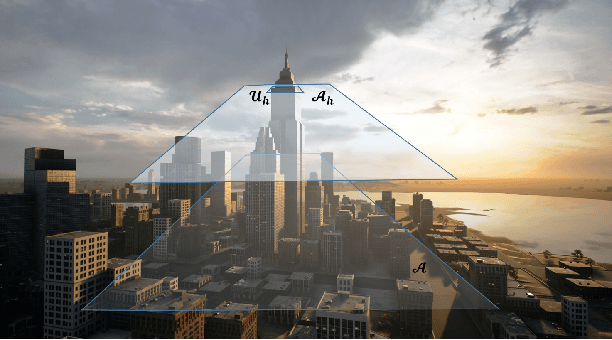
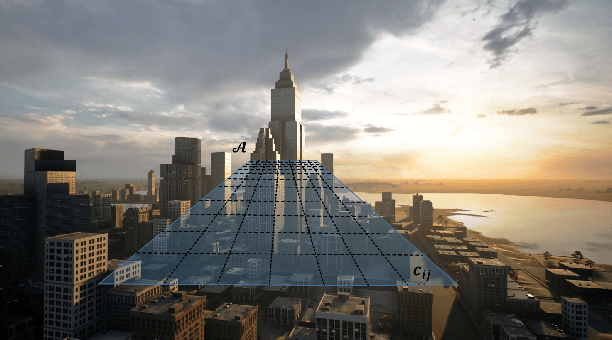
This paper considers the problem of finding a landing spot for a drone in a dense urban environment. The conflicting requirement of fast exploration and high resolution is solved using a multi-resolution approach, by which visual information is collected by the drone at decreasing altitudes so that spatial resolution of the acquired images increases monotonically. A probability distribution is used to capture the uncertainty of the decision process for each terrain patch. The distributions are updated as information from different altitudes is collected. When the confidence level for one of the patches becomes larger than a pre-specified threshold, suitability for landing is declared. One of the main building blocks of the approach is a semantic segmentation algorithm that attaches probabilities to each pixel of a single view. The decision algorithm combines these probabilities with a priori data and previous measurements to obtain the best estimates. Feasibility is illustrated by presenting a number of examples generated by a realistic closed-loop simulator.
Local Trajectory Planning For UAV Autonomous Landing
Nov 18, 2021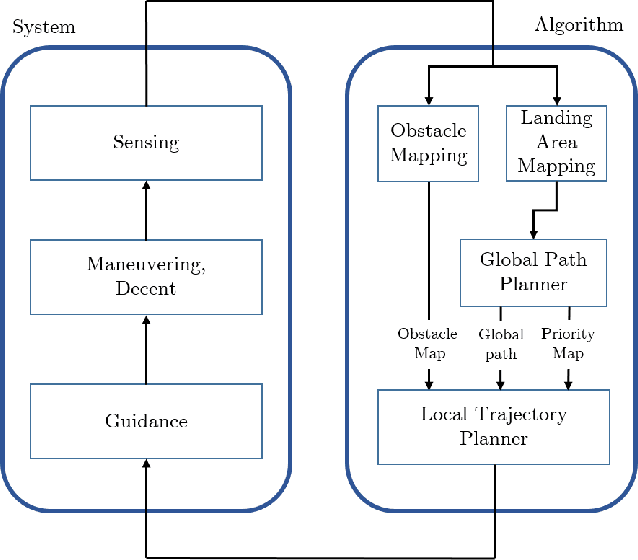
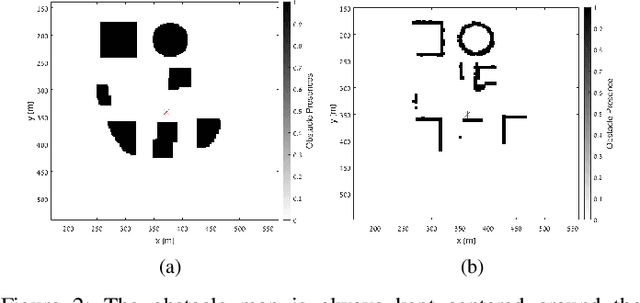
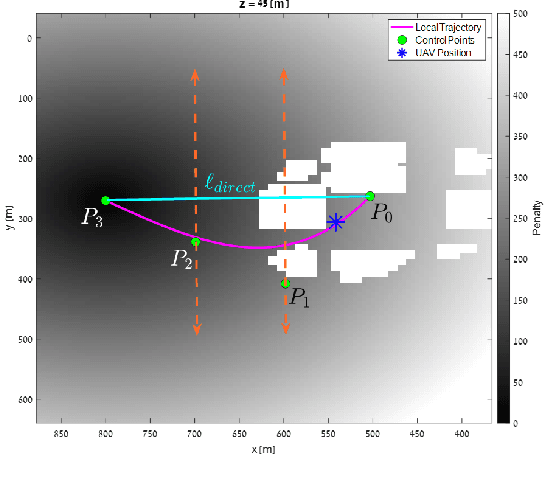
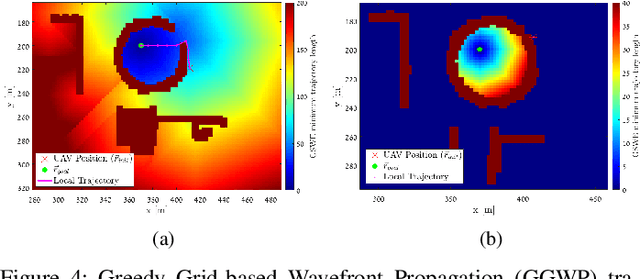
An important capability of autonomous Unmanned Aerial Vehicles (UAVs) is autonomous landing while avoiding collision with obstacles in the process. Such capability requires real-time local trajectory planning. Although trajectory-planning methods have been introduced for cases such as emergency landing, they have not been evaluated in real-life scenarios where only the surface of obstacles can be sensed and detected. We propose a novel optimization framework using a pre-planned global path and a priority map of the landing area. Several trajectory planning algorithms were implemented and evaluated in a simulator that includes a 3D urban environment, LiDAR-based obstacle-surface sensing and UAV guidance and dynamics. We show that using our proposed optimization criterion can successfully improve the landing-mission success probability while avoiding collisions with obstacles in real-time.
Vision-Based Navigation II: Error Analysis for a Navigation Algorithm based on Optical-Flow and a Digital Terrain Map
Aug 11, 2011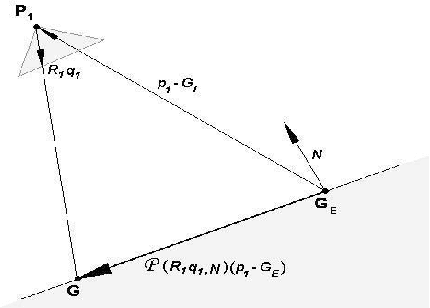
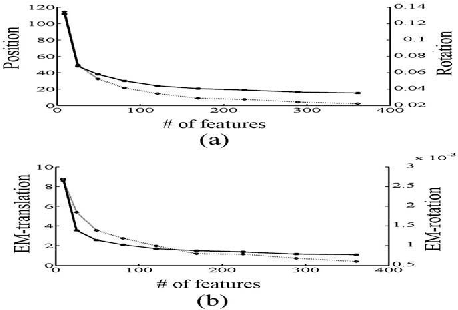
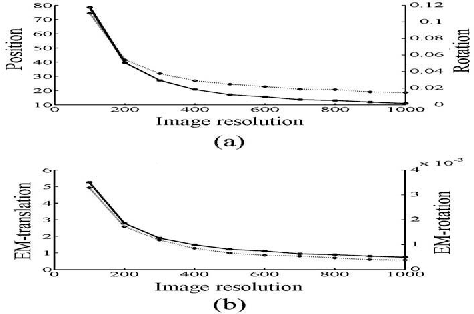
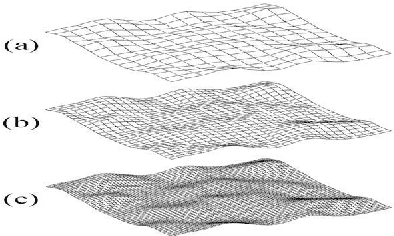
The paper deals with the error analysis of a navigation algorithm that uses as input a sequence of images acquired by a moving camera and a Digital Terrain Map (DTM) of the region been imaged by the camera during the motion. The main sources of error are more or less straightforward to identify: camera resolution, structure of the observed terrain and DTM accuracy, field of view and camera trajectory. After characterizing and modeling these error sources in the framework of the CDTM algorithm, a closed form expression for their effect on the pose and motion errors of the camera can be found. The analytic expression provides a priori measurements for the accuracy in terms of the parameters mentioned above.
* 10 pages,12 figures, 2 tables