 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMESSI: A Multi-Elevation Semantic Segmentation Image Dataset of an Urban Environment
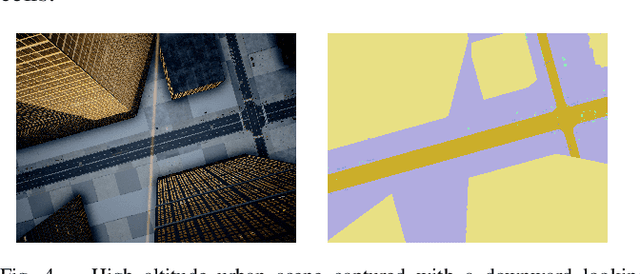
May 13, 2025This paper presents a Multi-Elevation Semantic Segmentation Image (MESSI) dataset comprising 2525 images taken by a drone flying over dense urban environments. MESSI is unique in two main features. First, it contains images from various altitudes, allowing us to investigate the effect of depth on semantic segmentation. Second, it includes images taken from several different urban regions (at different altitudes). This is important since the variety covers the visual richness captured by a drone's 3D flight, performing horizontal and vertical maneuvers. MESSI contains images annotated with location, orientation, and the camera's intrinsic parameters and can be used to train a deep neural network for semantic segmentation or other applications of interest (e.g., localization, navigation, and tracking). This paper describes the dataset and provides annotation details. It also explains how semantic segmentation was performed using several neural network models and shows several relevant statistics. MESSI will be published in the public domain to serve as an evaluation benchmark for semantic segmentation using images captured by a drone or similar vehicle flying over a dense urban environment.
Finding a Landing Site on an Urban Area: A Multi-Resolution Probabilistic Approach
Apr 26, 2022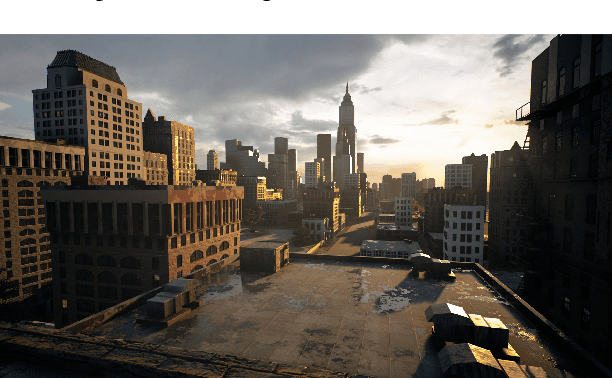
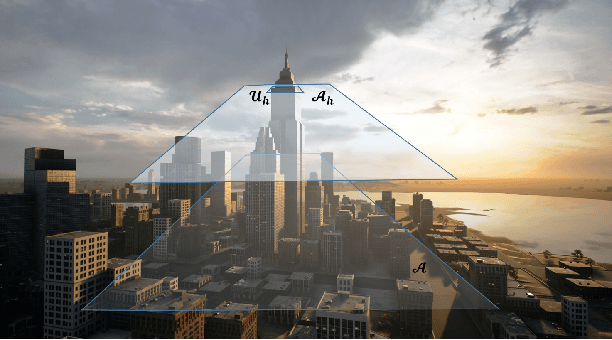
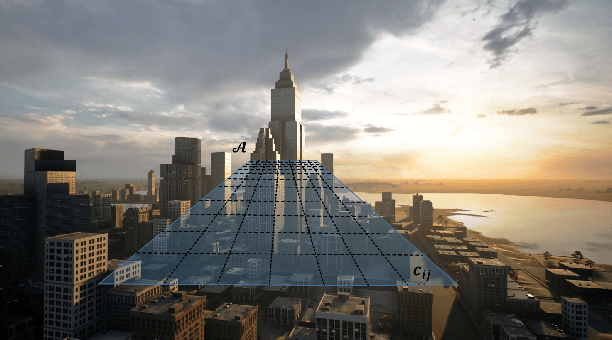
This paper considers the problem of finding a landing spot for a drone in a dense urban environment. The conflicting requirement of fast exploration and high resolution is solved using a multi-resolution approach, by which visual information is collected by the drone at decreasing altitudes so that spatial resolution of the acquired images increases monotonically. A probability distribution is used to capture the uncertainty of the decision process for each terrain patch. The distributions are updated as information from different altitudes is collected. When the confidence level for one of the patches becomes larger than a pre-specified threshold, suitability for landing is declared. One of the main building blocks of the approach is a semantic segmentation algorithm that attaches probabilities to each pixel of a single view. The decision algorithm combines these probabilities with a priori data and previous measurements to obtain the best estimates. Feasibility is illustrated by presenting a number of examples generated by a realistic closed-loop simulator.