 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLocal Trajectory Planning For UAV Autonomous Landing
Paper and Code
Nov 18, 2021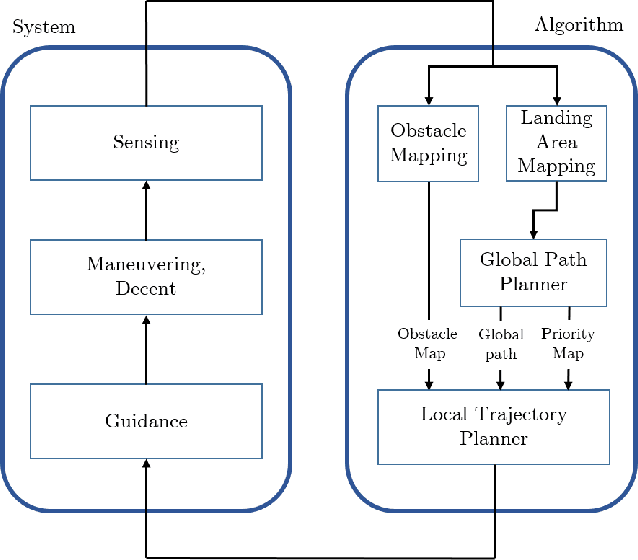
An important capability of autonomous Unmanned Aerial Vehicles (UAVs) is autonomous landing while avoiding collision with obstacles in the process. Such capability requires real-time local trajectory planning. Although trajectory-planning methods have been introduced for cases such as emergency landing, they have not been evaluated in real-life scenarios where only the surface of obstacles can be sensed and detected. We propose a novel optimization framework using a pre-planned global path and a priority map of the landing area. Several trajectory planning algorithms were implemented and evaluated in a simulator that includes a 3D urban environment, LiDAR-based obstacle-surface sensing and UAV guidance and dynamics. We show that using our proposed optimization criterion can successfully improve the landing-mission success probability while avoiding collisions with obstacles in real-time.