 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSmoothly Connected Preemptive Impact Reduction and Contact Impedance Control
Dec 07, 2022This study proposes novel control methods that lower impact force by preemptive movement and smoothly transition to conventional contact impedance control. These suggested techniques are for force control-based robots and position/velocity control-based robots, respectively. Strong impact forces have a negative influence on multiple robotic tasks. Recently, preemptive impact reduction techniques that expand conventional contact impedance control by using proximity sensors have been examined. However, a seamless transition from impact reduction to contact impedance control has not yet been accomplished. The proposed methods utilize a serial combined impedance control framework to solve this problem. The preemptive impact reduction feature can be added to the already implemented impedance controller because the parameter design is divided into impact reduction and contact impedance control. There is no undesirable contact force during the transition. Furthermore, even though the preemptive impact reduction employs a crude optical proximity sensor, the influence of reflectance is minimized using a virtual viscous force. Analyses and real-world experiments confirm these benefits.
RAPiD: Rotation-Aware People Detection in Overhead Fisheye Images
May 23, 2020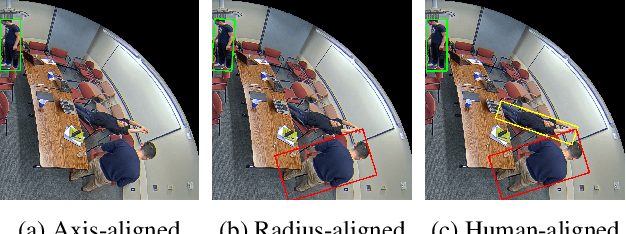

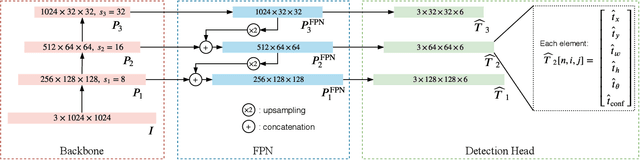
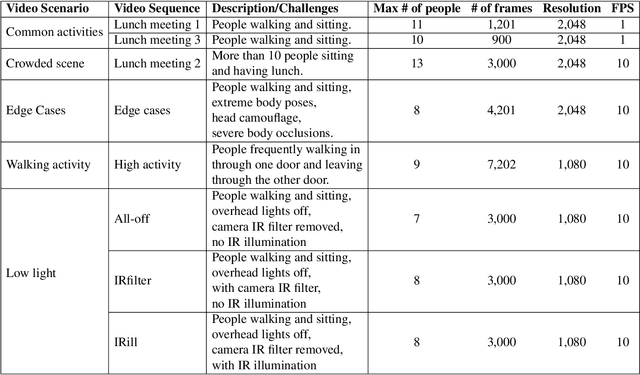
Recent methods for people detection in overhead, fisheye images either use radially-aligned bounding boxes to represent people, assuming people always appear along image radius or require significant pre-/post-processing which radically increases computational complexity. In this work, we develop an end-to-end rotation-aware people detection method, named RAPiD, that detects people using arbitrarily-oriented bounding boxes. Our fully-convolutional neural network directly regresses the angle of each bounding box using a periodic loss function, which accounts for angle periodicities. We have also created a new dataset with spatio-temporal annotations of rotated bounding boxes, for people detection as well as other vision tasks in overhead fisheye videos. We show that our simple, yet effective method outperforms state-of-the-art results on three fisheye-image datasets. Code and dataset are available at http://vip.bu.edu/rapid .