 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantized but Deceptive? A Multi-Dimensional Truthfulness Evaluation of Quantized LLMs
Aug 26, 2025Quantization enables efficient deployment of large language models (LLMs) in resource-constrained environments by significantly reducing memory and computation costs. While quantized LLMs often maintain performance on perplexity and zero-shot tasks, their impact on truthfulness-whether generating truthful or deceptive responses-remains largely unexplored. In this work, we introduce TruthfulnessEval, a comprehensive evaluation framework for assessing the truthfulness of quantized LLMs across three dimensions: (1) Truthfulness on Logical Reasoning; (2) Truthfulness on Common Sense; and (3) Truthfulness on Imitative Falsehoods. Using this framework, we examine mainstream quantization techniques (ranging from 4-bit to extreme 2-bit) across several open-source LLMs. Surprisingly, we find that while quantized models retain internally truthful representations, they are more susceptible to producing false outputs under misleading prompts. To probe this vulnerability, we test 15 rephrased variants of "honest", "neutral" and "deceptive" prompts and observe that "deceptive" prompts can override truth-consistent behavior, whereas "honest" and "neutral" prompts maintain stable outputs. Further, we reveal that quantized models "know" the truth internally yet still produce false outputs when guided by "deceptive" prompts via layer-wise probing and PCA visualizations. Our findings provide insights into future designs of quantization-aware alignment and truthfulness interventions.
When Truthful Representations Flip Under Deceptive Instructions?
Jul 29, 2025Large language models (LLMs) tend to follow maliciously crafted instructions to generate deceptive responses, posing safety challenges. How deceptive instructions alter the internal representations of LLM compared to truthful ones remains poorly understood beyond output analysis. To bridge this gap, we investigate when and how these representations ``flip'', such as from truthful to deceptive, under deceptive versus truthful/neutral instructions. Analyzing the internal representations of Llama-3.1-8B-Instruct and Gemma-2-9B-Instruct on a factual verification task, we find the model's instructed True/False output is predictable via linear probes across all conditions based on the internal representation. Further, we use Sparse Autoencoders (SAEs) to show that the Deceptive instructions induce significant representational shifts compared to Truthful/Neutral representations (which are similar), concentrated in early-to-mid layers and detectable even on complex datasets. We also identify specific SAE features highly sensitive to deceptive instruction and use targeted visualizations to confirm distinct truthful/deceptive representational subspaces. % Our analysis pinpoints layer-wise and feature-level correlates of instructed dishonesty, offering insights for LLM detection and control. Our findings expose feature- and layer-level signatures of deception, offering new insights for detecting and mitigating instructed dishonesty in LLMs.
FAEDKV: Infinite-Window Fourier Transform for Unbiased KV Cache Compression
Jul 26, 2025



The efficacy of Large Language Models (LLMs) in long-context tasks is often hampered by the substantial memory footprint and computational demands of the Key-Value (KV) cache. Current compression strategies, including token eviction and learned projections, frequently lead to biased representations -- either by overemphasizing recent/high-attention tokens or by repeatedly degrading information from earlier context -- and may require costly model retraining. We present FAEDKV (Frequency-Adaptive Infinite-Window for KV cache), a novel, training-free KV cache compression framework that ensures unbiased information retention. FAEDKV operates by transforming the KV cache into the frequency domain using a proposed Infinite-Window Fourier Transform (IWDFT). This approach allows for the equalized contribution of all tokens to the compressed representation, effectively preserving both early and recent contextual information. A preliminary frequency ablation study identifies critical spectral components for layer-wise, targeted compression. Experiments on LongBench benchmark demonstrate FAEDKV's superiority over existing methods by up to 22\%. In addition, our method shows superior, position-agnostic retrieval accuracy on the Needle-In-A-Haystack task compared to compression based approaches.
Dynamic Self-Distillation via Previous Mini-batches for Fine-tuning Small Language Models
Nov 25, 2024



Knowledge distillation (KD) has become a widely adopted approach for compressing large language models (LLMs) to reduce computational costs and memory footprints. However, the availability of complex teacher models is a prerequisite for running most KD pipelines. Thus, the traditional KD procedure can be unachievable or budget-unfriendly, particularly when relying on commercial LLMs like GPT4. In this regard, Self-distillation (SelfD) emerges as an advisable alternative, enabling student models to learn without teachers' guidance. Nonetheless, existing SelfD approaches for LMs often involve architectural modifications, assuming the models are open-source, which may not always be practical. In this work, we introduce a model-agnostic and task-agnostic method named dynamic SelfD from the previous minibatch (DynSDPB), which realizes current iterations' distillation from the last ones' generated logits. Additionally, to address prediction inaccuracies during the early iterations, we dynamically adjust the distillation influence and temperature values to enhance the adaptability of fine-tuning. Furthermore, DynSDPB is a novel fine-tuning policy that facilitates the seamless integration of existing self-correction and self-training techniques for small language models (SLMs) because they all require updating SLMs' parameters. We demonstrate the superior performance of DynSDPB on both encoder-only LMs (e.g., BERT model families) and decoder-only LMs (e.g., LLaMA model families), validating its effectiveness across natural language understanding (NLU) and natural language generation (NLG) benchmarks.
Indoor simultaneous localization and mapping based on fringe projection profilometry
Apr 23, 2022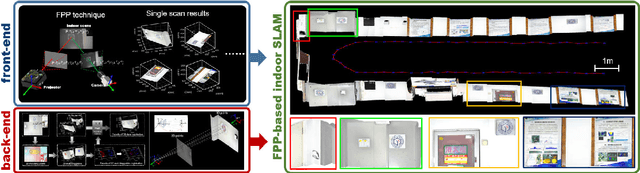
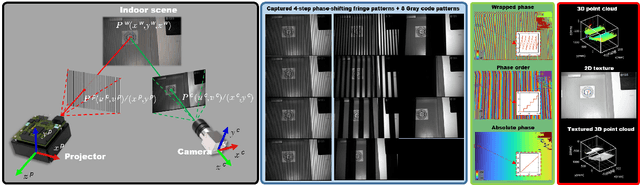
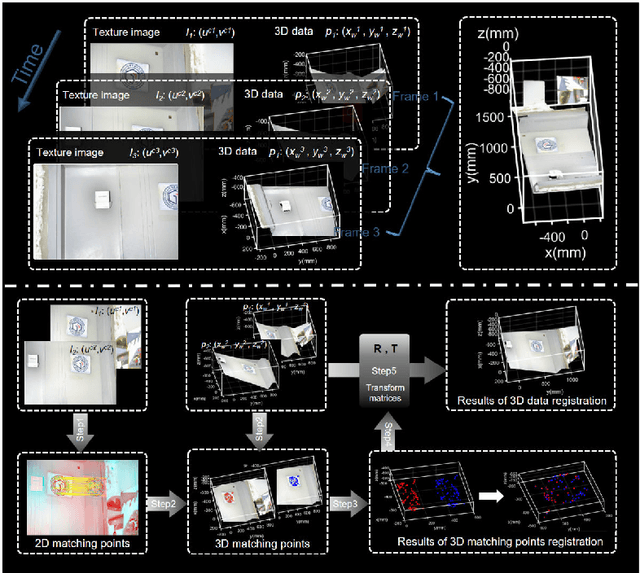
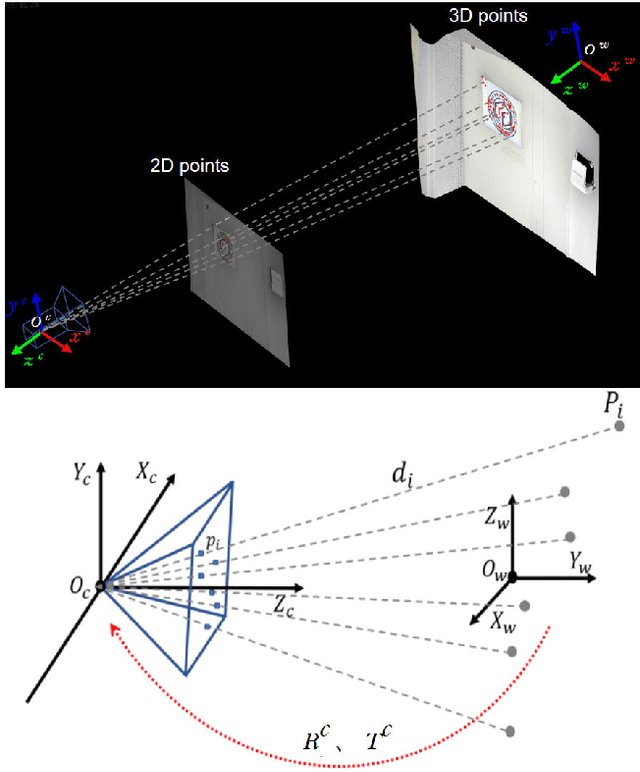
Simultaneous Localization and Mapping (SLAM) plays an important role in outdoor and indoor applications ranging from autonomous driving to indoor robotics. Outdoor SLAM has been widely used with the assistance of LiDAR or GPS. For indoor applications, the LiDAR technique does not satisfy the accuracy requirement and the GPS signals will be lost. An accurate and efficient scene sensing technique is required for indoor SLAM. As the most promising 3D sensing technique, the opportunities for indoor SLAM with fringe projection profilometry (FPP) systems are obvious, but methods to date have not fully leveraged the accuracy and speed of sensing that such systems offer. In this paper, we propose a novel FPP-based indoor SLAM method based on the coordinate transformation relationship of FPP, where the 2D-to-3D descriptor-assisted is used for mapping and localization. The correspondences generated by matching descriptors are used for fast and accurate mapping, and the transform estimation between the 2D and 3D descriptors is used to localize the sensor. The provided experimental results demonstrate that the proposed indoor SLAM can achieve the localization and mapping accuracy around one millimeter.