 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFinding Kissing Numbers with Game-theoretic Reinforcement Learning
Nov 17, 2025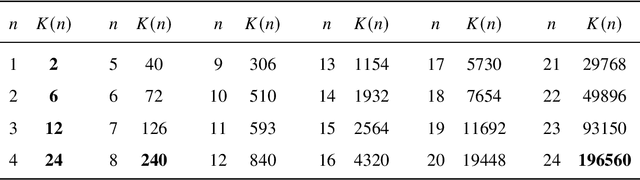
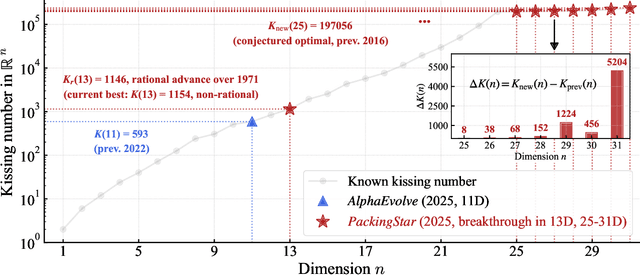
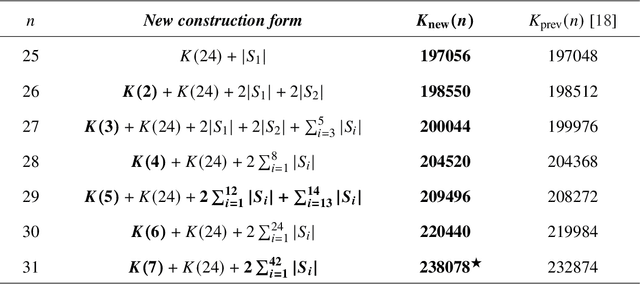
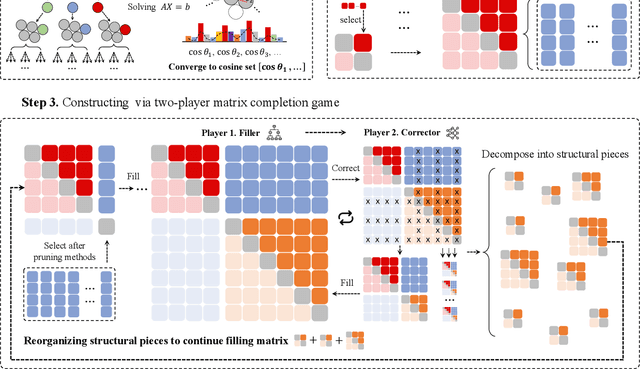
Since Isaac Newton first studied the Kissing Number Problem in 1694, determining the maximal number of non-overlapping spheres around a central sphere has remained a fundamental challenge. This problem represents the local analogue of Hilbert's 18th problem on sphere packing, bridging geometry, number theory, and information theory. Although significant progress has been made through lattices and codes, the irregularities of high-dimensional geometry and exponentially growing combinatorial complexity beyond 8 dimensions, which exceeds the complexity of Go game, limit the scalability of existing methods. Here we model this problem as a two-player matrix completion game and train the game-theoretic reinforcement learning system, PackingStar, to efficiently explore high-dimensional spaces. The matrix entries represent pairwise cosines of sphere center vectors; one player fills entries while another corrects suboptimal ones, jointly maximizing the matrix size, corresponding to the kissing number. This cooperative dynamics substantially improves sample quality, making the extremely large spaces tractable. PackingStar reproduces previous configurations and surpasses all human-known records from dimensions 25 to 31, with the configuration in 25 dimensions geometrically corresponding to the Leech lattice and suggesting possible optimality. It achieves the first breakthrough beyond rational structures from 1971 in 13 dimensions and discovers over 6000 new structures in 14 and other dimensions. These results demonstrate AI's power to explore high-dimensional spaces beyond human intuition and open new pathways for the Kissing Number Problem and broader geometry problems.
Temporal Query Network for Efficient Multivariate Time Series Forecasting
May 19, 2025Sufficiently modeling the correlations among variables (aka channels) is crucial for achieving accurate multivariate time series forecasting (MTSF). In this paper, we propose a novel technique called Temporal Query (TQ) to more effectively capture multivariate correlations, thereby improving model performance in MTSF tasks. Technically, the TQ technique employs periodically shifted learnable vectors as queries in the attention mechanism to capture global inter-variable patterns, while the keys and values are derived from the raw input data to encode local, sample-level correlations. Building upon the TQ technique, we develop a simple yet efficient model named Temporal Query Network (TQNet), which employs only a single-layer attention mechanism and a lightweight multi-layer perceptron (MLP). Extensive experiments demonstrate that TQNet learns more robust multivariate correlations, achieving state-of-the-art forecasting accuracy across 12 challenging real-world datasets. Furthermore, TQNet achieves high efficiency comparable to linear-based methods even on high-dimensional datasets, balancing performance and computational cost. The code is available at: https://github.com/ACAT-SCUT/TQNet.
SparseTSF: Modeling Long-term Time Series Forecasting with 1k Parameters
May 02, 2024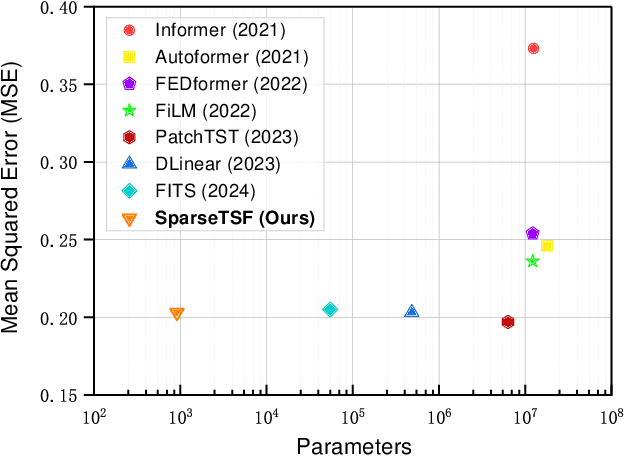
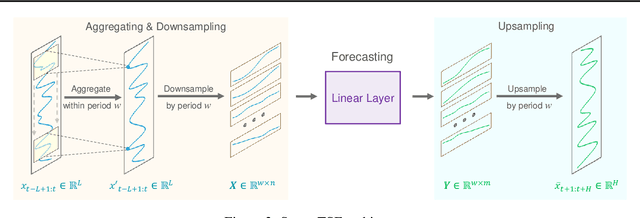
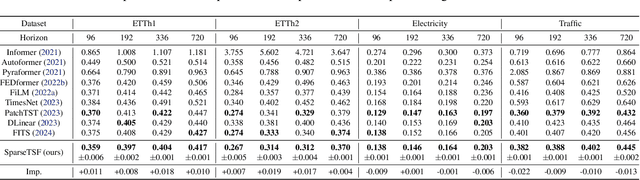
This paper introduces SparseTSF, a novel, extremely lightweight model for Long-term Time Series Forecasting (LTSF), designed to address the challenges of modeling complex temporal dependencies over extended horizons with minimal computational resources. At the heart of SparseTSF lies the Cross-Period Sparse Forecasting technique, which simplifies the forecasting task by decoupling the periodicity and trend in time series data. This technique involves downsampling the original sequences to focus on cross-period trend prediction, effectively extracting periodic features while minimizing the model's complexity and parameter count. Based on this technique, the SparseTSF model uses fewer than 1k parameters to achieve competitive or superior performance compared to state-of-the-art models. Furthermore, SparseTSF showcases remarkable generalization capabilities, making it well-suited for scenarios with limited computational resources, small samples, or low-quality data. The code is available at: https://github.com/lss-1138/SparseTSF.
Verified Compositional Neuro-Symbolic Control for Stochastic Systems with Temporal Logic Tasks
Nov 22, 2023Several methods have been proposed recently to learn neural network (NN) controllers for autonomous agents, with unknown and stochastic dynamics, tasked with complex missions captured by Linear Temporal Logic (LTL). Due to the sample-inefficiency of the majority of these works, compositional learning methods have been proposed decomposing the LTL specification into smaller sub-tasks. Then, separate controllers are learned and composed to satisfy the original task. A key challenge within these approaches is that they often lack safety guarantees or the provided guarantees are impractical. This paper aims to address this challenge. Particularly, we consider autonomous systems with unknown and stochastic dynamics and LTL-encoded tasks. We assume that the system is equipped with a finite set of base skills modeled by trained NN feedback controllers. Our goal is to check if there exists a temporal composition of the trained NN controllers - and if so, to compute it - that will yield a composite system behavior that satisfies the assigned LTL task with probability one. We propose a new approach that relies on a novel integration of automata theory and data-driven reachability analysis tools for NN-controlled stochastic systems. The resulting neuro-symbolic controller allows the agent to generate safe behaviors for unseen complex temporal logic tasks in a zero-shot fashion by leveraging its base skills. We show correctness of the proposed method and we provide conditions under which it is complete. To the best of our knowledge, this is the first work that designs verified temporal compositions of NN controllers for unknown and stochastic systems. Finally, we provide extensive numerical simulations and hardware experiments on robot navigation tasks to demonstrate the proposed method.