 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Time-series Forecasting Needs Kernelized Moment Balancing
Jan 31, 2026Deep time-series forecasting can be formulated as a distribution balancing problem aimed at aligning the distribution of the forecasts and ground truths. According to Imbens' criterion, true distribution balance requires matching the first moments with respect to any balancing function. We demonstrate that existing objectives fail to meet this criterion, as they enforce moment matching only for one or two predefined balancing functions, thus failing to achieve full distribution balance. To address this limitation, we propose direct forecasting with kernelized moment balancing (KMB-DF). Unlike existing objectives, KMB-DF adaptively selects the most informative balancing functions from a reproducing kernel hilbert space (RKHS) to enforce sufficient distribution balancing. We derive a tractable and differentiable objective that enables efficient estimation from empirical samples and seamless integration into gradient-based training pipelines. Extensive experiments across multiple models and datasets show that KMB-DF consistently improves forecasting accuracy and achieves state-of-the-art performance. Code is available at https://anonymous.4open.science/r/KMB-DF-403C.
ToolForge: A Data Synthesis Pipeline for Multi-Hop Search without Real-World APIs
Dec 18, 2025Training LLMs to invoke tools and leverage retrieved information necessitates high-quality, diverse data. However, existing pipelines for synthetic data generation often rely on tens of thousands of real API calls to enhance generalization, incurring prohibitive costs while lacking multi-hop reasoning and self-reflection. To address these limitations, we introduce ToolForge, an automated synthesis framework that achieves strong real-world tool-calling performance by constructing only a small number of virtual tools, eliminating the need for real API calls. ToolForge leverages a (question, golden context, answer) triple to synthesize large-scale tool-learning data specifically designed for multi-hop search scenarios, further enriching the generated data through multi-hop reasoning and self-reflection mechanisms. To ensure data fidelity, we employ a Multi-Layer Validation Framework that integrates both rule-based and model-based assessments. Empirical results show that a model with only 8B parameters, when trained on our synthesized data, outperforms GPT-4o on multiple benchmarks. Our code and dataset are publicly available at https://github.com/Buycar-arb/ToolForge .
Data-driven Nonlinear Model Reduction to Spectral Submanifolds in Mechanical Systems
Oct 05, 2021



While data-driven model reduction techniques are well-established for linearizable mechanical systems, general approaches to reducing non-linearizable systems with multiple coexisting steady states have been unavailable. In this paper, we review such a data-driven nonlinear model reduction methodology based on spectral submanifolds (SSMs). As input, this approach takes observations of unforced nonlinear oscillations to construct normal forms of the dynamics reduced to very low dimensional invariant manifolds. These normal forms capture amplitude-dependent properties and are accurate enough to provide predictions for non-linearizable system response under the additions of external forcing. We illustrate these results on examples from structural vibrations, featuring both synthetic and experimental data.
Dynamically Mitigating Data Discrepancy with Balanced Focal Loss for Replay Attack Detection
Jun 25, 2020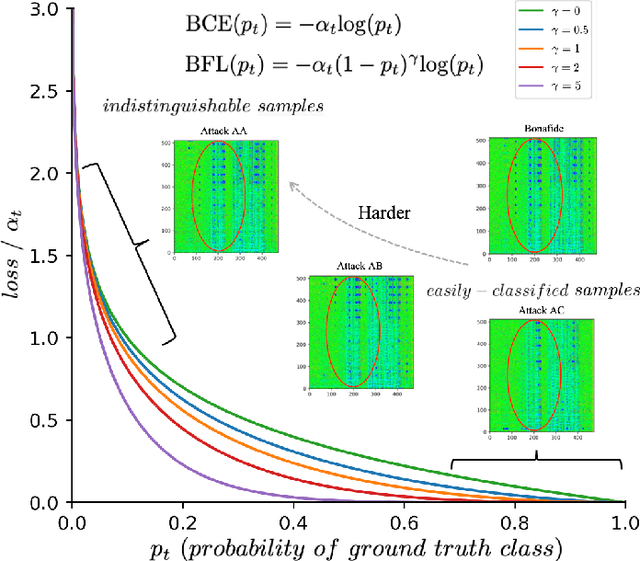
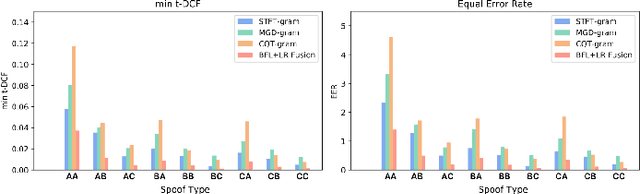
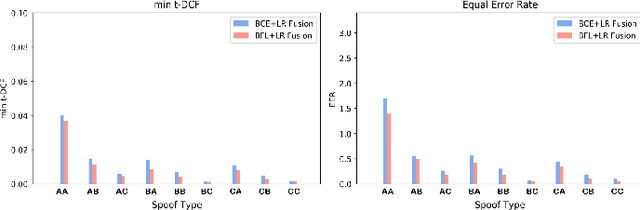
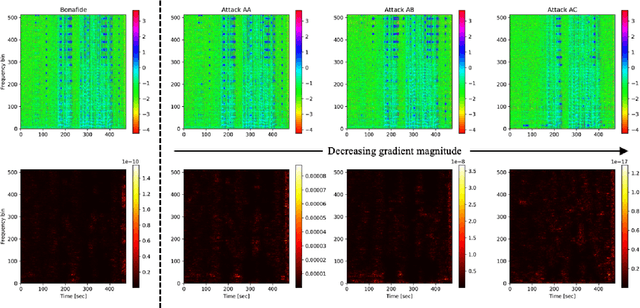
It becomes urgent to design effective anti-spoofing algorithms for vulnerable automatic speaker verification systems due to the advancement of high-quality playback devices. Current studies mainly treat anti-spoofing as a binary classification problem between bonafide and spoofed utterances, while lack of indistinguishable samples makes it difficult to train a robust spoofing detector. In this paper, we argue that for anti-spoofing, it needs more attention for indistinguishable samples over easily-classified ones in the modeling process, to make correct discrimination a top priority. Therefore, to mitigate the data discrepancy between training and inference, we propose to leverage a balanced focal loss function as the training objective to dynamically scale the loss based on the traits of the sample itself. Besides, in the experiments, we select three kinds of features that contain both magnitude-based and phase-based information to form complementary and informative features. Experimental results on the ASVspoof2019 dataset demonstrate the superiority of the proposed methods by comparison between our systems and top-performing ones. Systems trained with the balanced focal loss perform significantly better than conventional cross-entropy loss. With complementary features, our fusion system with only three kinds of features outperforms other systems containing five or more complex single models by 22.5% for min-tDCF and 7% for EER, achieving a min-tDCF and an EER of 0.0124 and 0.55% respectively. Furthermore, we present and discuss the evaluation results on real replay data apart from the simulated ASVspoof2019 data, indicating that research for anti-spoofing still has a long way to go.