 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Training in Multi-Agent Reinforcement Learning: A Communication-Free Framework for the Box-Pushing Problem
Nov 19, 2024



Self-organizing systems consist of autonomous agents that can perform complex tasks and adapt to dynamic environments without a central controller. Prior research often relies on reinforcement learning to enable agents to gain the skills needed for task completion, such as in the box-pushing environment. However, when agents push from opposing directions during exploration, they tend to exert equal and opposite forces on the box, resulting in minimal displacement and inefficient training. This paper proposes a model called Shared Pool of Information (SPI), which enables information to be accessible to all agents and facilitates coordination, reducing force conflicts among agents and enhancing exploration efficiency. Through computer simulations, we demonstrate that SPI not only expedites the training process but also requires fewer steps per episode, significantly improving the agents' collaborative effectiveness.
Localized Adversarial Training for Increased Accuracy and Robustness in Image Classification
Sep 10, 2019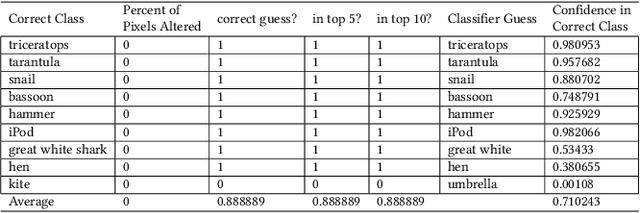

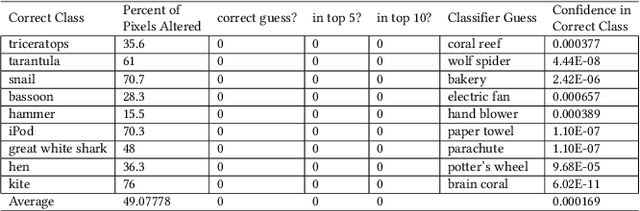
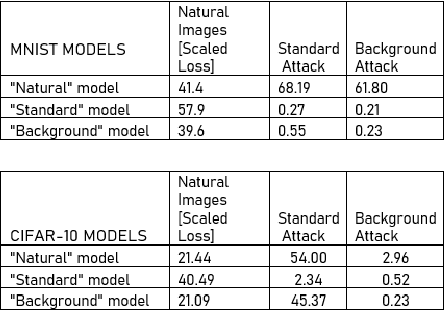
Today's state-of-the-art image classifiers fail to correctly classify carefully manipulated adversarial images. In this work, we develop a new, localized adversarial attack that generates adversarial examples by imperceptibly altering the backgrounds of normal images. We first use this attack to highlight the unnecessary sensitivity of neural networks to changes in the background of an image, then use it as part of a new training technique: localized adversarial training. By including locally adversarial images in the training set, we are able to create a classifier that suffers less loss than a non-adversarially trained counterpart model on both natural and adversarial inputs. The evaluation of our localized adversarial training algorithm on MNIST and CIFAR-10 datasets shows decreased accuracy loss on natural images, and increased robustness against adversarial inputs.
Vision-based Traffic Flow Prediction using Dynamic Texture Model and Gaussian Process
Dec 15, 2016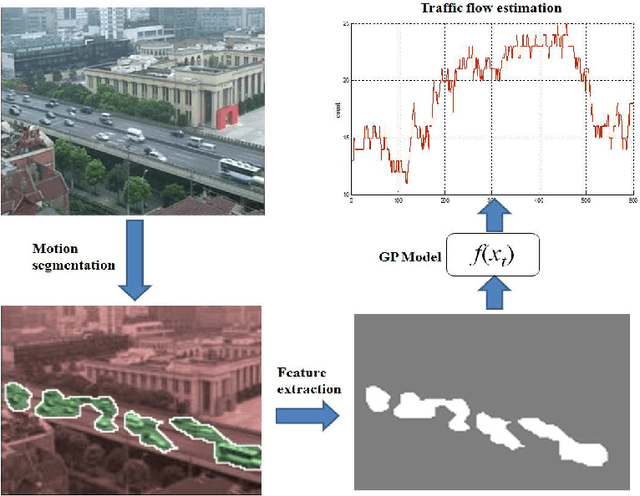
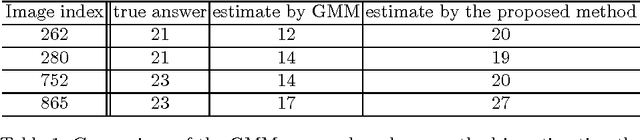
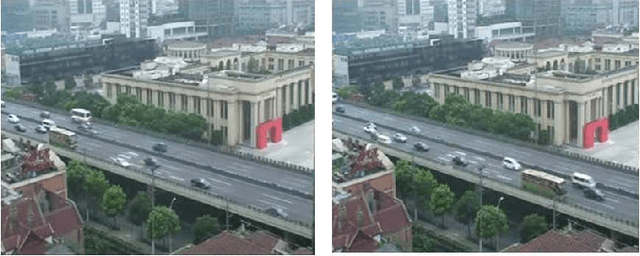
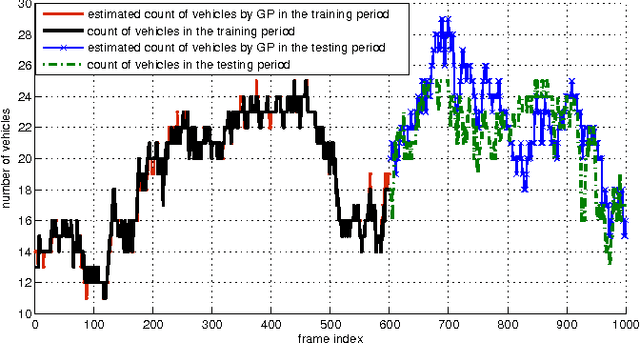
In this paper, we describe work in progress towards a real-time vision-based traffic flow prediction (TFP) system. The proposed method consists of three elemental operators, that are dynamic texture model based motion segmentation, feature extraction and Gaussian process (GP) regression. The objective of motion segmentation is to recognize the target regions covering the moving vehicles in the sequence of visual processes. The feature extraction operator aims to extract useful features from the target regions. The extracted features are then mapped to the number of vehicles through the operator of GP regression. A training stage using historical visual data is required for determining the parameter values of the GP. Using a low-resolution visual data set, we performed preliminary evaluations on the performance of the proposed method. The results show that our method beats a benchmark solution based on Gaussian mixture model, and has the potential to be developed into qualified and practical solutions to real-time TFP.