 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based Traffic Flow Prediction using Dynamic Texture Model and Gaussian Process
Paper and Code
Dec 15, 2016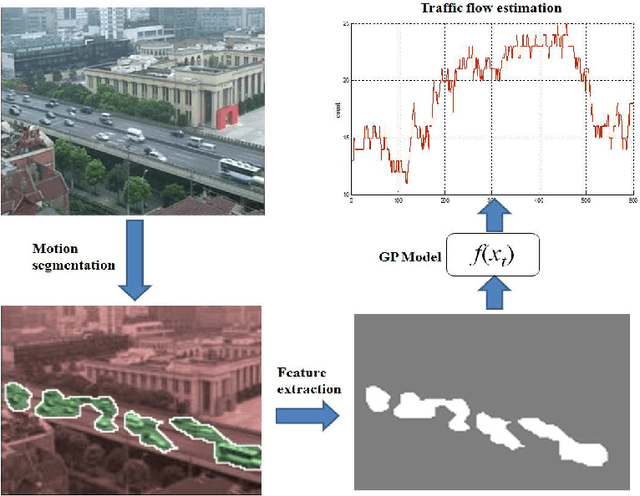
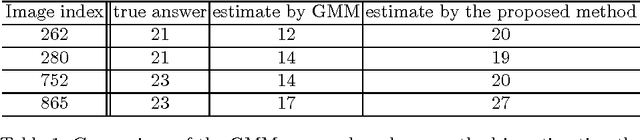
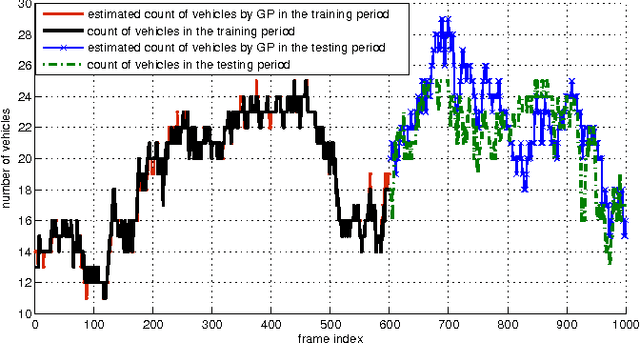
In this paper, we describe work in progress towards a real-time vision-based traffic flow prediction (TFP) system. The proposed method consists of three elemental operators, that are dynamic texture model based motion segmentation, feature extraction and Gaussian process (GP) regression. The objective of motion segmentation is to recognize the target regions covering the moving vehicles in the sequence of visual processes. The feature extraction operator aims to extract useful features from the target regions. The extracted features are then mapped to the number of vehicles through the operator of GP regression. A training stage using historical visual data is required for determining the parameter values of the GP. Using a low-resolution visual data set, we performed preliminary evaluations on the performance of the proposed method. The results show that our method beats a benchmark solution based on Gaussian mixture model, and has the potential to be developed into qualified and practical solutions to real-time TFP.