 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBihoT: A Large-Scale Dataset and Benchmark for Hyperspectral Camouflaged Object Tracking
Aug 22, 2024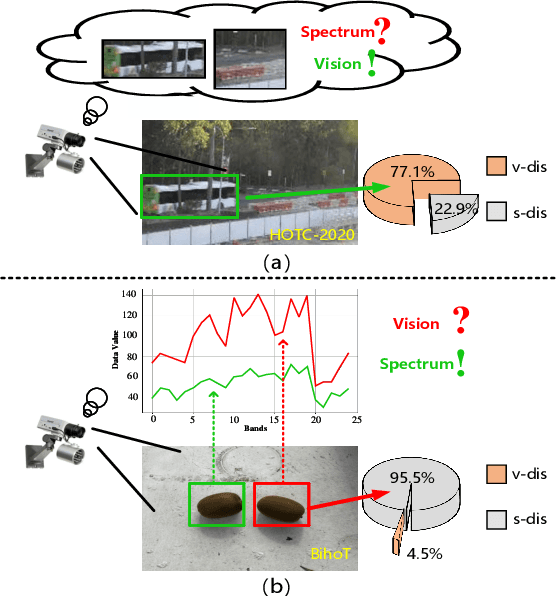

Hyperspectral object tracking (HOT) has exhibited potential in various applications, particularly in scenes where objects are camouflaged. Existing trackers can effectively retrieve objects via band regrouping because of the bias in existing HOT datasets, where most objects tend to have distinguishing visual appearances rather than spectral characteristics. This bias allows the tracker to directly use the visual features obtained from the false-color images generated by hyperspectral images without the need to extract spectral features. To tackle this bias, we find that the tracker should focus on the spectral information when object appearance is unreliable. Thus, we provide a new task called hyperspectral camouflaged object tracking (HCOT) and meticulously construct a large-scale HCOT dataset, termed BihoT, which consists of 41,912 hyperspectral images covering 49 video sequences. The dataset covers various artificial camouflage scenes where objects have similar appearances, diverse spectrums, and frequent occlusion, making it a very challenging dataset for HCOT. Besides, a simple but effective baseline model, named spectral prompt-based distractor-aware network (SPDAN), is proposed, comprising a spectral embedding network (SEN), a spectral prompt-based backbone network (SPBN), and a distractor-aware module (DAM). Specifically, the SEN extracts spectral-spatial features via 3-D and 2-D convolutions. Then, the SPBN fine-tunes powerful RGB trackers with spectral prompts and alleviates the insufficiency of training samples. Moreover, the DAM utilizes a novel statistic to capture the distractor caused by occlusion from objects and background. Extensive experiments demonstrate that our proposed SPDAN achieves state-of-the-art performance on the proposed BihoT and other HOT datasets.
SSF-Net: Spatial-Spectral Fusion Network with Spectral Angle Awareness for Hyperspectral Object Tracking
Mar 09, 2024



Hyperspectral video (HSV) offers valuable spatial, spectral, and temporal information simultaneously, making it highly suitable for handling challenges such as background clutter and visual similarity in object tracking. However, existing methods primarily focus on band regrouping and rely on RGB trackers for feature extraction, resulting in limited exploration of spectral information and difficulties in achieving complementary representations of object features. In this paper, a spatial-spectral fusion network with spectral angle awareness (SST-Net) is proposed for hyperspectral (HS) object tracking. Firstly, to address the issue of insufficient spectral feature extraction in existing networks, a spatial-spectral feature backbone ($S^2$FB) is designed. With the spatial and spectral extraction branch, a joint representation of texture and spectrum is obtained. Secondly, a spectral attention fusion module (SAFM) is presented to capture the intra- and inter-modality correlation to obtain the fused features from the HS and RGB modalities. It can incorporate the visual information into the HS spectral context to form a robust representation. Thirdly, to ensure a more accurate response of the tracker to the object position, a spectral angle awareness module (SAAM) investigates the region-level spectral similarity between the template and search images during the prediction stage. Furthermore, we develop a novel spectral angle awareness loss (SAAL) to offer guidance for the SAAM based on similar regions. Finally, to obtain the robust tracking results, a weighted prediction method is considered to combine the HS and RGB predicted motions of objects to leverage the strengths of each modality. Extensive experiments on the HOTC dataset demonstrate the effectiveness of the proposed SSF-Net, compared with state-of-the-art trackers.