 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Reinforcement Learning using Action Projection: Safeguard the Policy or the Environment?
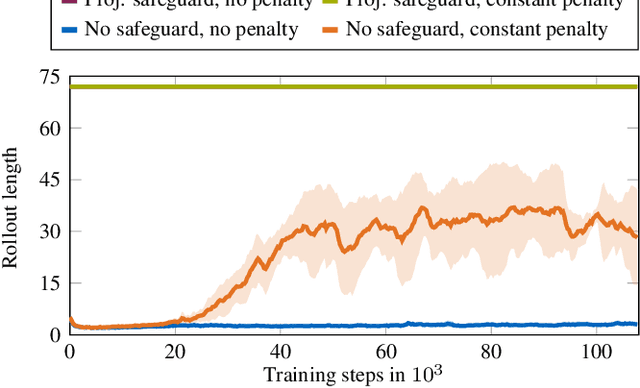
Sep 16, 2025Projection-based safety filters, which modify unsafe actions by mapping them to the closest safe alternative, are widely used to enforce safety constraints in reinforcement learning (RL). Two integration strategies are commonly considered: Safe environment RL (SE-RL), where the safeguard is treated as part of the environment, and safe policy RL (SP-RL), where it is embedded within the policy through differentiable optimization layers. Despite their practical relevance in safety-critical settings, a formal understanding of their differences is lacking. In this work, we present a theoretical comparison of SE-RL and SP-RL. We identify a key distinction in how each approach is affected by action aliasing, a phenomenon in which multiple unsafe actions are projected to the same safe action, causing information loss in the policy gradients. In SE-RL, this effect is implicitly approximated by the critic, while in SP-RL, it manifests directly as rank-deficient Jacobians during backpropagation through the safeguard. Our contributions are threefold: (i) a unified formalization of SE-RL and SP-RL in the context of actor-critic algorithms, (ii) a theoretical analysis of their respective policy gradient estimates, highlighting the role of action aliasing, and (iii) a comparative study of mitigation strategies, including a novel penalty-based improvement for SP-RL that aligns with established SE-RL practices. Empirical results support our theoretical predictions, showing that action aliasing is more detrimental for SP-RL than for SE-RL. However, with appropriate improvement strategies, SP-RL can match or outperform improved SE-RL across a range of environments. These findings provide actionable insights for choosing and refining projection-based safe RL methods based on task characteristics.
PyTupli: A Scalable Infrastructure for Collaborative Offline Reinforcement Learning Projects
May 22, 2025Offline reinforcement learning (RL) has gained traction as a powerful paradigm for learning control policies from pre-collected data, eliminating the need for costly or risky online interactions. While many open-source libraries offer robust implementations of offline RL algorithms, they all rely on datasets composed of experience tuples consisting of state, action, next state, and reward. Managing, curating, and distributing such datasets requires suitable infrastructure. Although static datasets exist for established benchmark problems, no standardized or scalable solution supports developing and sharing datasets for novel or user-defined benchmarks. To address this gap, we introduce PyTupli, a Python-based tool to streamline the creation, storage, and dissemination of benchmark environments and their corresponding tuple datasets. PyTupli includes a lightweight client library with defined interfaces for uploading and retrieving benchmarks and data. It supports fine-grained filtering at both the episode and tuple level, allowing researchers to curate high-quality, task-specific datasets. A containerized server component enables production-ready deployment with authentication, access control, and automated certificate provisioning for secure use. By addressing key barriers in dataset infrastructure, PyTupli facilitates more collaborative, reproducible, and scalable offline RL research.
CommonPower: Supercharging Machine Learning for Smart Grids
Jun 05, 2024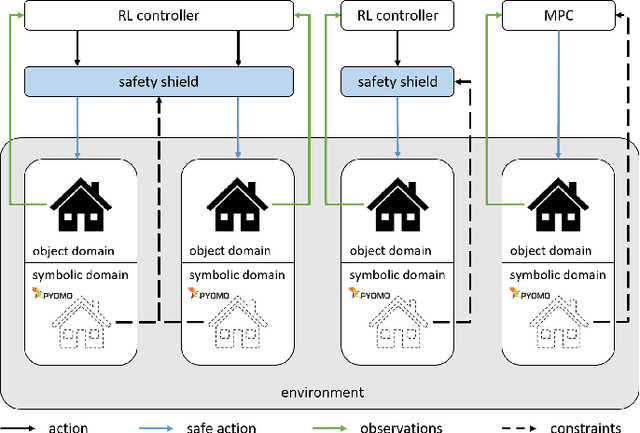
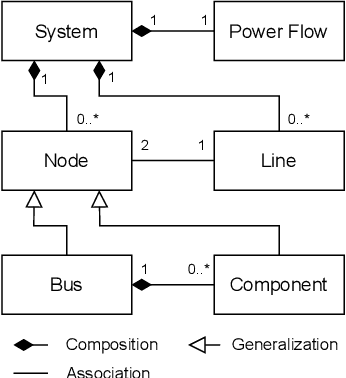
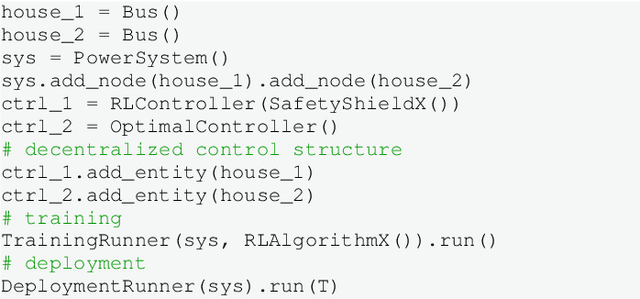
The growing complexity of power system management has led to an increased interest in the use of reinforcement learning (RL). However, no tool for comprehensive and realistic benchmarking of RL in smart grids exists. One prerequisite for such a comparison is a safeguarding mechanism since vanilla RL controllers can not guarantee the satisfaction of system constraints. Other central requirements include flexible modeling of benchmarking scenarios, credible baselines, and the possibility to investigate the impact of forecast uncertainties. Our Python tool CommonPower is the first modular framework addressing these needs. CommonPower offers a unified interface for single-agent and multi-agent RL training algorithms and includes a built-in model predictive control approach based on a symbolic representation of the system equations. This makes it possible to combine model predictive controllers with RL controllers in the same system. Leveraging the symbolic system model, CommonPower facilitates the study of safeguarding strategies via the flexible formulation of safety layers. Furthermore equipped with a generic forecasting interface, CommonPower constitutes a versatile tool significantly augmenting the exploration of safe RL controllers in smart grids on several dimensions.
Contingency-constrained economic dispatch with safe reinforcement learning
May 12, 2022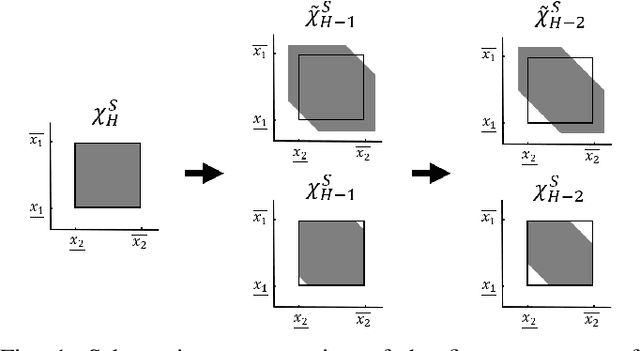
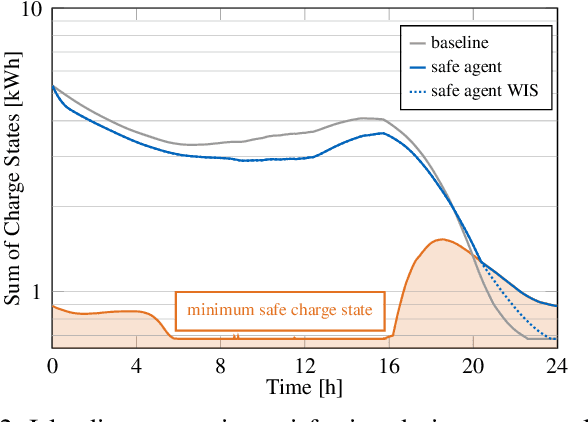
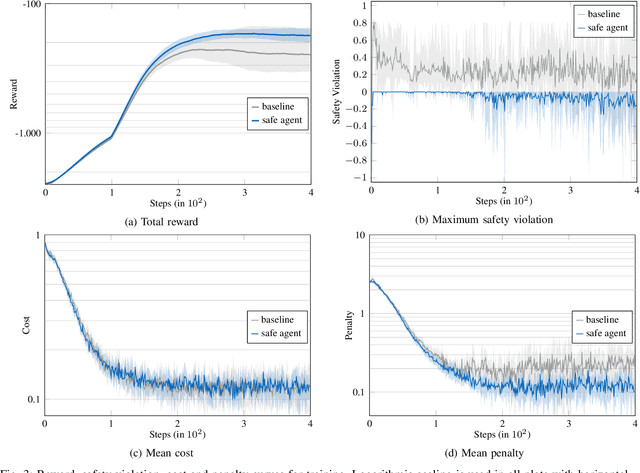
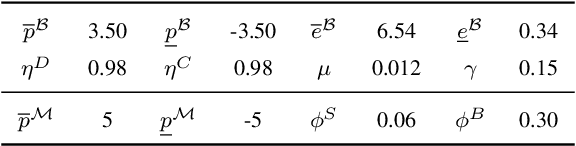
Future power systems will rely heavily on micro grids with a high share of decentralised renewable energy sources and energy storage systems. The high complexity and uncertainty in this context might make conventional power dispatch strategies infeasible. Reinforcement-learning based (RL) controllers can address this challenge, however, cannot themselves provide safety guarantees, preventing their deployment in practice. To overcome this limitation, we propose a formally validated RL controller for economic dispatch. We extend conventional constraints by a time-dependent constraint encoding the islanding contingency. The contingency constraint is computed using set-based backwards reachability analysis and actions of the RL agent are verified through a safety layer. Unsafe actions are projected into the safe action space while leveraging constrained zonotope set representations for computational efficiency. The developed approach is demonstrated on a residential use case using real-world measurements.