 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgei2LQR: Iterative LQR for Iterative Tasks in Dynamic Environments
Mar 17, 2023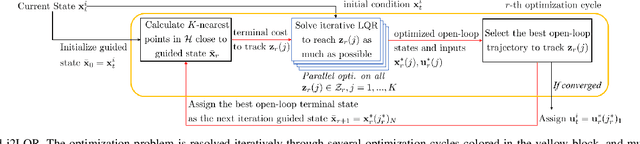
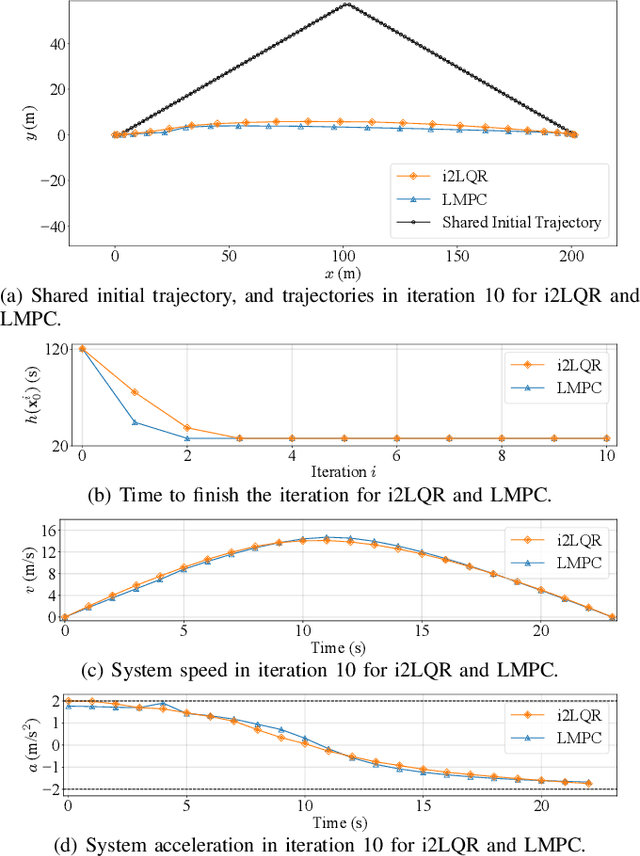
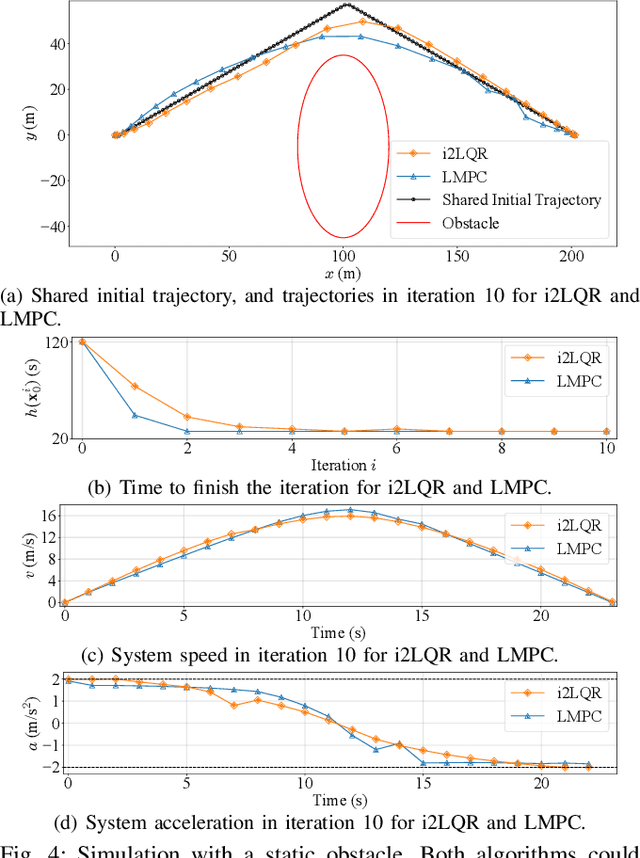
This work introduces a novel control strategy called Iterative Linear Quadratic Regulator for Iterative Tasks (i2LQR), which aims to pursue optimal performance for iterative tasks in a dynamic environment. The proposed algorithm is reference-free and utilizes historical data from previous iterations to enhance the performance of the autonomous system. Unlike existing algorithms, the i2LQR computes the optimal solution in an iterative manner at each timestamp, rendering it well-suited for iterative tasks with changing constraints at different iterations. To evaluate the performance of the proposed algorithm, we conduct numerical simulations for an iterative task aimed at minimizing completion time. The results show that i2LQR achieves the optimal performance as the state-of-the-art algorithm in static environments, and outperforms the state-of-the-art algorithm in dynamic environments with both static and dynamics obstacles.