 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuroMorphix: A Novel Brain MRI Asymmetry-specific Feature Construction Approach For Seizure Recurrence Prediction
Apr 16, 2024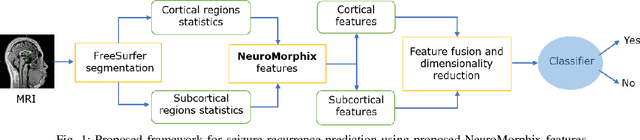
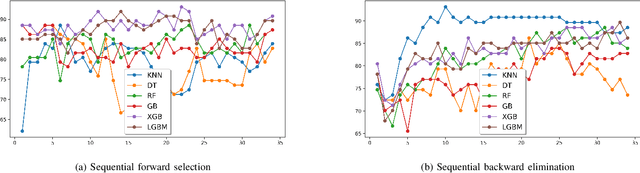
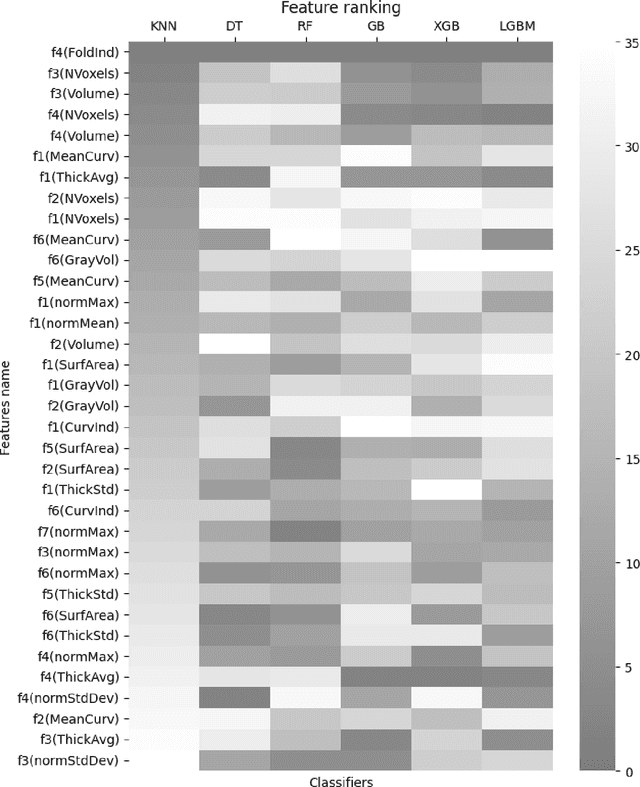
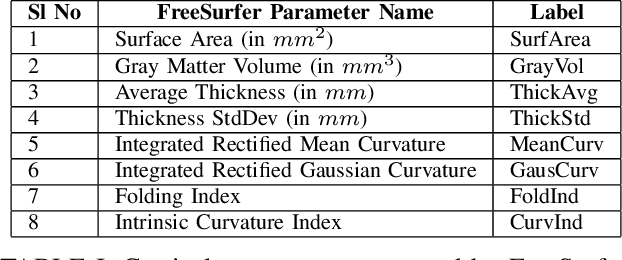
Seizure recurrence is an important concern after an initial unprovoked seizure; without drug treatment, it occurs within 2 years in 40-50% of cases. The decision to treat currently relies on predictors of seizure recurrence risk that are inaccurate, resulting in unnecessary, possibly harmful, treatment in some patients and potentially preventable seizures in others. Because of the link between brain lesions and seizure recurrence, we developed a recurrence prediction tool using machine learning and clinical 3T brain MRI. We developed NeuroMorphix, a feature construction approach based on MRI brain anatomy. Each of seven NeuroMorphix features measures the absolute or relative difference between corresponding regions in each cerebral hemisphere. FreeSurfer was used to segment brain regions and to generate values for morphometric parameters (8 for each cortical region and 5 for each subcortical region). The parameters were then mapped to whole brain NeuroMorphix features, yielding a total of 91 features per subject. Features were generated for a first seizure patient cohort (n = 169) categorised into seizure recurrence and non-recurrence subgroups. State-of-the-art classification algorithms were trained and tested using NeuroMorphix features to predict seizure recurrence. Classification models using the top 5 features, ranked by sequential forward selection, demonstrated excellent performance in predicting seizure recurrence, with area under the ROC curve of 88-93%, accuracy of 83-89%, and F1 score of 83-90%. Highly ranked features aligned with structural alterations known to be associated with epilepsy. This study highlights the potential for targeted, data-driven approaches to aid clinical decision-making in brain disorders.
Using an Improved Output Feedback MPC Approach for Developing a Haptic Virtual Training System
Mar 12, 2023Haptic training simulators generally consist of three major components, namely a human operator, a haptic interface, and a virtual environment. Appropriate dynamic modeling of each of these components can have far-reaching implications for the whole system's performance improvement in terms of transparency, the analogy to the real environment, and stability. In this paper, we developed a virtual-based haptic training simulator for Endoscopic Sinus Surgery (ESS) by doing a dynamic characterization of the phenomenological sinus tissue fracture in the virtual environment, using an input-constrained linear parametric variable model. A parallel robot manipulator equipped with a calibrated force sensor is employed as a haptic interface. A lumped five-parameter single-degree-of-freedom mass-stiffness-damping impedance model is assigned to the operator's arm dynamic. A robust online output feedback quasi-min-max model predictive control (MPC) framework is proposed to stabilize the system during the switching between the piecewise linear dynamics of the virtual environment. The simulations and the experimental results demonstrate the effectiveness of the proposed control algorithm in terms of robustness and convergence to the desired impedance quantities.